Paper:
Development of Tensegrity Manipulator Driven by 40 Pneumatic Cylinders for Investigating Functionality in Hyper-Redundant Musculoskeletal Systems
Yuhei Yoshimitsu and Shuhei Ikemoto

Kyushu Institute of Technology
2-4 Hibikino, Wakamatsu-ku, Kitakyushu, Fukuoka 808-0196, Japan

Musculoskeletal systems are characterized by their structural softness and drive redundancy. The objective of this study was to reproduce these features using a tensegrity manipulator. The developed tensegrity manipulator was formed by replacing 40 of the 80 cables of class-1 tensegrity consisting of 20 struts with pneumatic cylinders to allow it to bend actively. This paper presents the design details of the manipulator and an analysis of its characteristics during various motions. We confirmed that this robotic platform could reproduce abstract features of the musculoskeletal system. In addition, we discuss the issues that must be addressed in the control of this robot according to the experimental results.
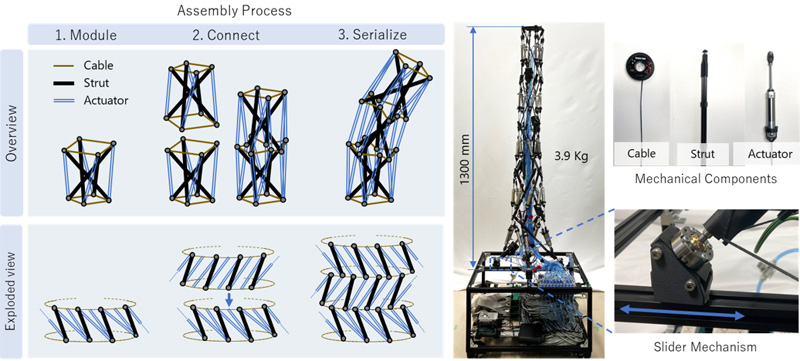
Tensegrity manipulator driven by 40 pneumatic cylinders
- [1] R. Pfeifer, M. Lungarella, and F. Iida, “Self-organization, embodiment, and biologically inspired robotics,” Science, Vol.318, No.5853, pp. 1088-1093, 2007. https://doi.org/10.1126/science.1145803
- [2] J. Wang, W. Chen, X. Xiao, Y. Xu, C. Li, X. Jia, and M. Q. H. Meng, “A survey of the development of biomimetic intelligence and robotics,” Biomimetic Intelligence and Robotics, Vol.1, Article No.100001, 2021. https://doi.org/10.1016/j.birob.2021.100001
- [3] D. A. Neumann, “Kinesiology of the musculoskeletal system-e-book: Foundations for rehabilitation,” Elsevier Health Sciences, 2016.
- [4] H. Shin, S. Ikemoto, and K. Hosoda, “Constructive understanding and reproduction of functions of gluteus medius by using a musculoskeletal walking robot,” Advanced Robotics, Vol.32, No.4, pp. 202-214, 2018. https://doi.org/10.1080/01691864.2018.1434015
- [5] A. Hitzmann, H. Masuda, S. Ikemoto, and K. Hosoda, “Anthropomorphic musculoskeletal 10 degrees-of-freedom robot arm driven by pneumatic artificial muscles,” Advanced Robotics, Vol.32, No.15, pp. 865-878, 2018. https://doi.org/10.1080/01691864.2018.1494040
- [6] T. Kozuki, H. Toshinori, T. Shirai, S. Nakashima, Y. Asano, Y. Kakiuchi, K. Okada, and M. Inaba, “Skeletal structure with artificial perspiration for cooling by latent heat for musculoskeletal humanoid kengoro,” 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2135-2140, 2016. https://doi.org/10.1109/IROS.2016.7759335
- [7] S. Kurumaya, K. Suzumori, H. Nabae, and S. Wakimoto, “Musculoskeletal lower-limb robot driven by multifilament muscles,” ROBOMECH J., Vol.3, No.1, Article No.18, 2016. https://doi.org/10.1186/s40648-016-0061-3
- [8] Y. Nakanishi, Y. Asano, T. Kozuki, H. Mizoguchi, Y. Motegi, M. Osada, T. Shirai, J. Urata, K. Okada, and M. Inaba, “Design concept of detail musculoskeletal humanoid “kenshiro” – Toward a real human body musculoskeletal simulator,” 2012 12th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids 2012), pp. 1-6, 2012. https://doi.org/10.1109/HUMANOIDS.2012.6651491
- [9] S. Kim, C. Laschi, and B. Trimmer, “Soft robotics: A bioinspired evolution in robotics,” Trends in Biotechnology, Vol.31, No.5, pp. 287-294, 2013. https://doi.org/10.1016/j.tibtech.2013.03.002
- [10] D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, Vol.521, pp. 467-475, 2015. https://doi.org/10.1038/nature14543
- [11] C. Laschi, B. Mazzolai, and M. Cianchetti, “Soft robotics: Technologies and systems pushing the boundaries of robot abilities,” Science Robotics, Vol.1, No.1, Article No.eaah3690, 2016. https://doi.org/10.1126/scirobotics.aah3690
- [12] R. E. Skelton and M. C. Oliveira, “Tensegrity Systems,” Springer Nature, 2009. https://doi.org/10.1007/978-0-387-74242-7
- [13] C. Paul, F. J. Valero-Cuevas, and H. Lipson, “Design and control of tensegrity robots for locomotion,” IEEE Trans. on Robotics, Vol.22, No.5, pp. 944-957, 2006. https://doi.org/10.1109/TRO.2006.878980
- [14] M. Shibata and S. Hirai, “Rolling locomotion of deformable tensegrity structure,” Mobile Robotics, pp. 479-486, 2009. https://doi.org/10.1142/9789814291279_0059
- [15] K. Kim, A. K. Agogino, and A. M. Agogino, “Rolling locomotion of cable-driven soft spherical tensegrity robots,” Soft Robotics, Vol.7, No.3, pp. 346-361, 2020. https://doi.org/10.1089/soro.2019.0056
- [16] J. Rieffel and J.-B. Mouret, “Adaptive and resilient soft tensegrity robots,” Soft Robotics, Vol.5, No.3, pp. 318-329, 2018. https://doi.org/10.1089/soro.2017.0066
- [17] M. Vespignani, J. M. Friesen, V. SunSpiral, and J. Bruce, “Design of superball v2, a compliant tensegrity robot for absorbing large impacts,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2865-2871, 2018. https://doi.org/10.1109/IROS.2018.8594374
- [18] K. Kim, D. Moon, J. Y. Bin, and A. M. Agogino, “Design of a spherical tensegrity robot for dynamic locomotion,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 450-455, 2017. https://doi.org/10.1109/IROS.2017.8202192
- [19] S. Lessard, D. Castro, W. Asper, S. D. Chopra, L. B. Baltaxe-Admony, M. Teodorescu, V. SunSpiral, and A. Agogino, “A bio-inspired tensegrity manipulator with multi-dof, structurally compliant joints,” 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 5515-5520, 2016. https://doi.org/10.1109/IROS.2016.7759811
- [20] E. Jung, V. Ly, N. Cessna, M. L. Ngo, D. Castro, V. SunSpiral, and M. Teodorescu, “Bio-inspired tensegrity flexural joints,” 2018 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 5561-5566, 2018. https://doi.org/10.1109/ICRA.2018.8461027
- [21] D. Fadeyev, A. Zhakatayev, A. Kuzdeuov, and H. A. Varol, “Generalized dynamics of stacked tensegrity manipulators,” IEEE Access, Vol.7, pp. 63472-63484, 2019. https://doi.org/10.1109/ACCESS.2019.2916681
- [22] D. Wei, T. Gao, X. Mo, R. Xi, and C. Zhou, “Flexible bio-tensegrity manipulator with multi-degree of freedom and variable structure,” Chinese J. of Mechanical Engineering, Vol.33, No.1, Article No.3, 2020. https://doi.org/10.1186/s10033-019-0426-7
- [23] V. Ramadoss, K. Sagar, M. S. Ikbal, J. H. L. Calles, R. Siddaraboina, and M. Zoppi, “Hedra: A bio-inspired modular tensegrity robot with polyhedral parallel modules,” 2022 IEEE 5th Int. Conf. on Soft Robotics (RoboSoft), pp. 559-564, 2022. https://doi.org/10.1109/RoboSoft54090.2022.9762130
- [24] R. Kobayashi, H. Nabae, G. Endo, and K. Suzumori, “Soft tensegrity robot driven by thin artificial muscles for the exploration of unknown spatial configurations,” IEEE Robotics and Automation Letters, Vol.7, No.2, pp. 5349-5356, 2022. https://doi.org/10.1109/LRA.2022.3153700
- [25] S. Ikemoto, K. Tsukamoto, and Y. Yoshimitsu, “Development of a modular tensegrity robot arm capable of continuous bending,” Frontiers in Robotics and AI, Vol.8, Article No.774253, 2021. https://doi.org/10.3389/frobt.2021.774253
- [26] Y. Yoshimitsu, K. Tsukamoto, and S. Ikemoto, “Development of pneumatically driven tensegrity manipulator without mechanical springs,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3145-3150, 2022. https://doi.org/10.1109/IROS47612.2022.9982208
- [27] B. R. Tietz, R. W. Carnahan, R. J. Bachmann, R. D. Quinn, and V. SunSpiral, “Tetraspine: Robust terrain handling on a tensegrity robot using central pattern generators,” 2013 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 261-267, 2013. https://doi.org/10.1109/AIM.2013.6584102
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.