Letter:
Initial Localization of Mobile Robot Based on Expansion Resetting Without Manual Pose Adjustment in Robot Challenge Experiment
Seo Takeda* and Tomohiro Umetani**

*Graduate School of Natural Science, Konan University
8-9-1 Okamoto, Higashinada, Kobe, Hyogo 658-8501, Japan
**Department of Intelligence and Informatics, Konan University
8-9-1 Okamoto, Higashinada, Kobe, Hyogo 658-8501, Japan

This study proposes a method for estimating the initial position of a mobile robot during a mobile robot experiment using expansion resetting. Depending on the type of sensor attached to the robot and the robot position and orientation estimation method, many operations may be required to estimate the initial position of the robot during an experimental run. The proposed method reduces the time and manual operations required to estimate the initial position and orientation of a mobile robot. The implementation of the method and its experimental results demonstrated the feasibility and effectiveness of the procedure.
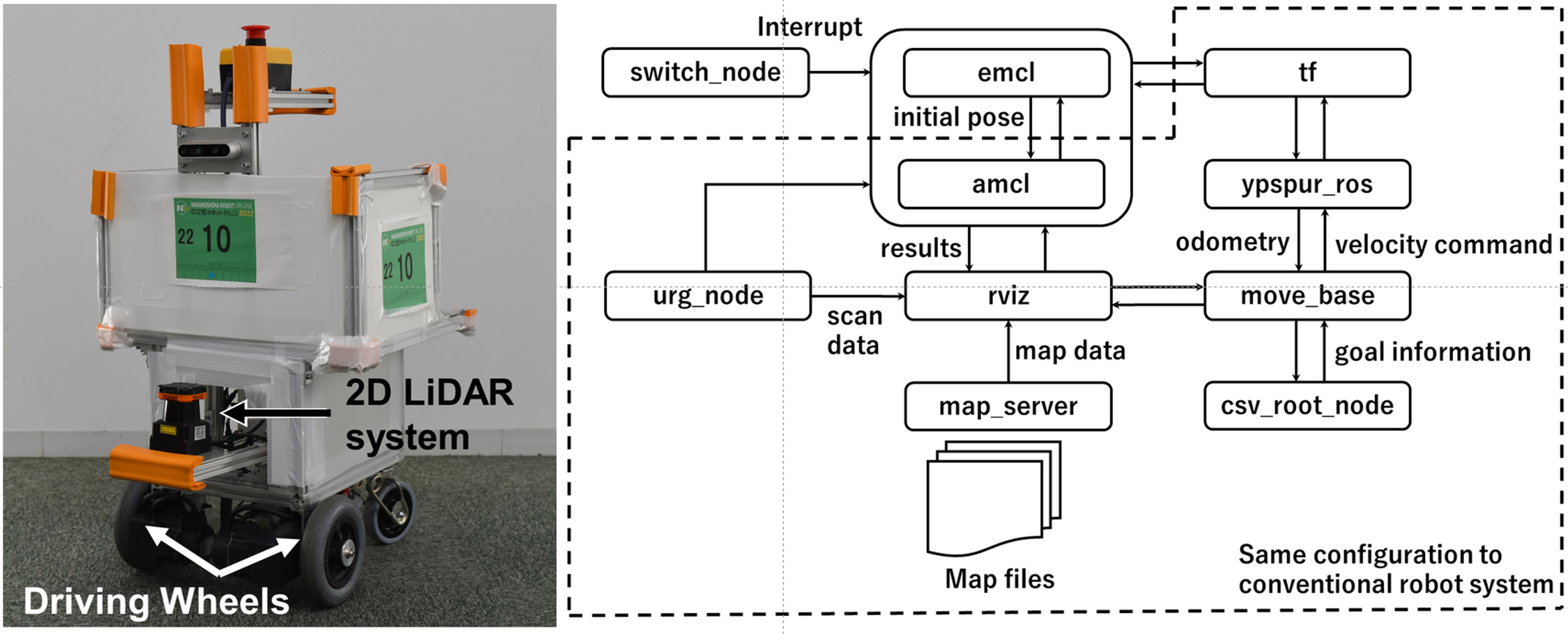
System configuration in robot challenge experiment
- [1] S. Yuta, “Tsukuba Challenge: Open Experiments for Autonomous Navigation of Mobile Robots in the City – Activities and Results of the First and Second Stages –,” J. Robot. Mechatron., Vol.30, No.4, pp. 504-512, 2018.
- [2] Y. Hara, T. Tomizawa, H. Date, Y. Kuroda, and T. Tsubouchi, “Tsukuba Challenge 2019: Task Setting and Experimental Results,” J. Robot. Mechatron., Vol.32, No.6, pp. 1104-1111, 2020.
- [3] T. Takubo, S. Aoyagi, Y. Inoue, A. Imazu, and K. Ikoma, “Report of Nakanoshima Challenge 2019,” Proc. of the 20th SICE System Integration Division Annual Conf. (SI2019), pp. 1937-1938, 2019 (in Japanese).
- [4] T. Takubo, “Recommendation of Participating Robotics Challenges,” Proc. of the 63rd Annual Conf. of the Institute of Systems, Control and Information Engineers (SCI’19), pp. 685-688, 2019 (in Japanese).
- [5] S. Tanaka and Y. Inoue, “Outdoor Human Detection with Stereo Omnidirectional Cameras,” J. Robot. Mechatron., Vol.32, No.6, pp. 1193-1199, 2020.
- [6] R. Miyagusuku, Y. Arai, Y. Kakigi, T. Takebayashi, A. Fukushima, and K. Ozaki, “Toward Autonomous Garbage Collection Robots in Terrains with Different Elevations,” J. Robot. Mechatron., Vol.32, No.6, pp. 1164-1172, 2020.
- [7] J. Xue, Z. Li, M. Fukuda, T. Takahashi, M. Suzuki, Y. Mae, Y. Arai, and S. Aoyagi, “Garbage Detection Using YOLOv3 in Nakanoshima Challenge,” J. Robot. Mechatron., Vol.32, No.6, pp. 1200-1210, 2020.
- [8] K. Shigematsu, Y. Konishi, R. Mitsudome, and T. Tsubouchi, “Recognition of Pedestrian Traffic Light at Crosswalk for a Mobile Robot Using Deep Learning,” Trans. of the Society of Instrument and Control Engineers, Vol.54, No.1, pp. 99-110, 2018 (in Japanese).
- [9] S. Tarao, Y. Fujiwara, N. Tsuda, and S. Tanaka, “Prototyping Using a Mobile Robot Platform Equipped with Low-End In-Wheel Motor,” J. Robot. Mechatron., Vol.32, No.6, pp. 1154-1163, 2020.
- [10] S. Hara, T. Shimizu, M. Konishi, R. Yamamura, and S. Ikemoto, “Autonomous Mobile Robot for Outdoor Slope Using 2D LiDAR with Uniaxial Gimbal Mechanism,” J. Robot. Mechatron., Vol.32, No.6, pp. 1173-1182, 2020.
- [11] T. Umetani, Y. Kondo, and T. Tokuda, “Rapid Development of a Mobile Robot for the Nakanoshima Challenge Using a Robot for Intelligent Environments,” J. Robot. Mechatron., Vol.32, No.6, pp. 1211-1218, 2020.
- [12] M. Fukuda, T. Takahashi, M. Suzuki, Y. Mae, Y. Arai, and S. Aoyagi, “Proposal of Robot Software Platform with High Sustainability,” J. Robot. Mechatron., Vol.32, No.6, pp. 1219-1228, 2020.
- [13] R. Ueda, T. Arai, K. Sakamoto, T. Kikuchi, and S. Kamiya, “Expansion Resetting for Recovery from Fatal Error in Monte Carlo Localization – Comparison with Sensor Resetting Methods,” 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vol.3, pp. 2481-2486, 2004.
- [14] R. Ueda, T. Arai, K. Asanuma, K. Umeda, and H. Osumi, “Recovery Methods for Fatal Estimation Errors on Monte Carlo Localization,” J. of the Robotics Society of Japan, Vol.23, No.4, pp. 466-473, 2005 (in Japanese).
- [15] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” The MIT Press, 2005.
- [16] S. Takeda, R. Yamamoto, Y. Shirakata, and T. Umetani, “Development of Mobile Service Robot from Robotics Laboratory at Konan University for the Nakanoshima Robot Challenge 2022,” Proc. of the 23rd SICE System Integration Division Annual Conf. (SI2022), pp. 1170-1173, 2022 (in Japanese).
- [17] T. Ikebe, Y. Cao, S. Takahashi, A. C. Perez, Y. Hayashibara, and R. Ueda, “Challenge to Tsukuba Challenge with a Small Mobile Robot,” Proc. of the 22nd SICE System Integration Division Annual Conf. (SI2021), pp. 3390-3393, 2021 (in Japanese).
- [18] K. Natsusako, H. Inoue, S. Terato, T. Amano, K. Kubota, H. Goto, S. Shiotani, S. Shimamura, T. Nagashima, R. Ueda and Y. Hayashibara, “Development Activity of Chiba Institute of Technology Robot Design and Control Laboratory in Tsukuba Challenge 2016,” Proc. of the 17th SICE System Integration Division Annual Conf. (SI2016), 1B2-3, 2016 (in Japanese).
- [19] T. Eda, T. Hasegawa, S. Nakamura, and S. Yuta, “Development of Autonomous Mobile Robot ‘MML-05’ Based on i-Cart Mini for Tsukuba Challenge 2015,” J. Robot. Mechatron., Vol.28, No.4, pp. 461-469, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.