Paper:
Body Stiffness Control for Using Body-Environment Interaction with a Closed-Link Deformable Mobile Robot
Yuichiro Sueoka, Naoto Takebe, Yasuhiro Sugimoto, and Koichi Osuka
Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

It is necessary for the robot to use interactions from the environment through the body in order to adaptively move through various environments. When the robot is faced with a narrow path or a space with many pillars, it should be able to use its interaction with the environment to thin its own shape, i.e., it should have a flexible body. In contrast, in the case where we want the robot to move forward powerfully on a slope or uneven terrain (small steps), it is preferable for the robot to rigidify its own body and exert a strong propulsive force in response to interactions from the environment. In this paper, we present an idea of a mobile robot that can adjust its body flexibility (stiffness) to realize such adaptive behavior, and furthermore, we demonstrate its validity through experiments. Specifically, we propose a closed-link deformable mobile robot whose stiffness can be adjusted by indirectly driving joints. We design a function that increases the stiffness of the body by controlling the joints to follow the target angle quickly, and a function that decreases the stiffness of the body by controlling the joints to follow the angle slowly. The effectiveness of a robot that can adjust its stiffness is demonstrated through experiments of traversing narrow paths and steps. We also discuss propulsion control that takes advantage of the deformable mobile robot and its applicability to uneven slopes due to the flexibility of the links.
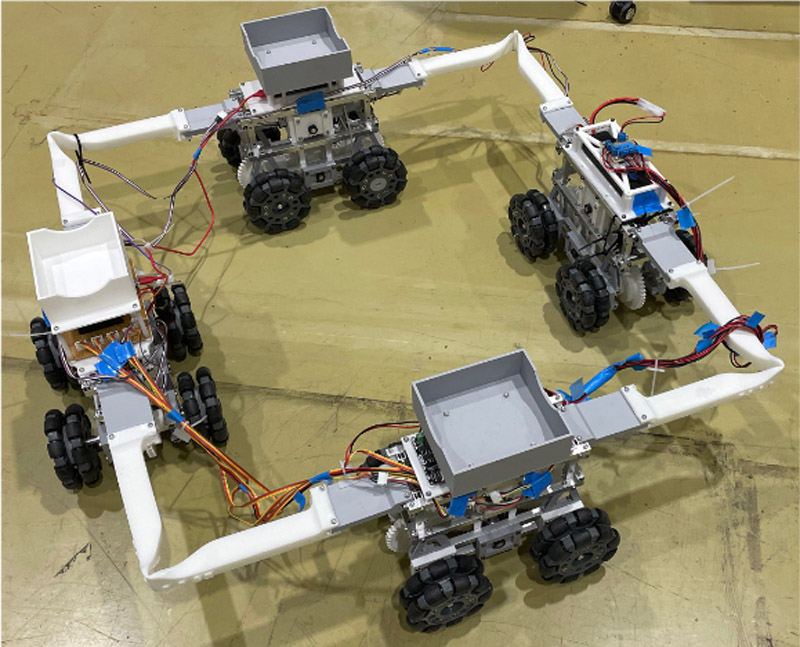
Closed link deformable mobile robot
- [1] R. Pfeifer and C. Scheier, “Understanding Intelligence,” A Bradford Book, 2001.
- [2] S. Tadokoro, “Rescue robotics: DDT project on robots and systems for urban search and rescue,” Springer, 2009.
- [3] K. Nagatani, M. Abe, K. Osuka, P. J. Chun, T. Okatani, M. Nishio, S. Chikushi, T. Matsubara, Y. Ikemoto, and H. Asama, “Innovative technologies for infrastructure construction and maintenance through collaborative robots based on an open design approach,” Advanced Robotics, Vol.35, No.11, pp. 715-722, 2021.
- [4] D. Y. Lee, S. R. Kim, J. S. Kim, J. J. Park, and K. J. Cho, “Origami wheel transformer: A variable-diameter wheel drive robot using an origami structure,” Soft Robotics, Vol.4, No.2, pp. 163-180, 2017.
- [5] S. Ryu, Y. Lee, and T. Seo, “Shape-morphing wheel design and analysis for step climbing in high speed locomotion,” IEEE Robotics and Automation Letters, Vol.5, No.2, pp. 1977-1982, 2020.
- [6] H. Komura, H. Yamada, S. Hirose, G. Endo, and K. Suzumori, “Study of swing-grouser wheel: A wheel for climbing high steps, even in low friction environment,” Proc. of 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4159-4164, 2015.
- [7] S. Nakajima, “Rt-mover: a rough terrain mobile robot with a simple leg-wheel hybrid mechanism,” The Int. J. of Robotics Research, Vol.30, No.13, pp. 1609-1626, 2011.
- [8] K. Tadakuma, R. Tadakuma, A. Maruyama, E. Rohmer, K. Nagatani, K. Yoshida, A. Ming, M. Shimojo, M. Higashimori, and M. Kaneko, “Mechanical design of the wheel-leg hybrid mobile robot to realize a large wheel diameter,” Proc. of 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3358-3365, 2010.
- [9] B. D. Harrington and C. Voorhees, “The Challenges of Designing the Rocker-Bogie Suspension for the Mars Exploration Rover,” 37th Aerospace Mechanisms Symposium, 2004.
- [10] A. Verma, C. Yadav, B. Singh, A. Gupta, J. Mishra, and A. Saxena, “Design of Rocker-Bogie Mechanism,” Int. J. of Innovative Science and Research Technology, Vol.2, No.5, pp. 312-338, 2017.
- [11] J. Liu, X. Zhang, and G. Hao, “Survey on research and development of reconfigurable modular robots,” Advances in Mechanical Engineering, Vol.8, No.8, pp. 1-21, 2016.
- [12] R. J. Alattas, S. Patel, and T. M. Sobh, “Evolutionary modular robotics: Survey and analysis,” J. of Intelligent & Robotic Systems, Vol.95, No.3, pp. 815-828, 2019.
- [13] J. W. Romanishin, K. Gilpin, S. Claici, and D. Rus, “3D M-Blocks: Self-reconfiguring robots capable of locomotion via pivoting in three dimensions,” Proc. of 2015 IEEE Int. Conf. on Robotics and Automation, pp. 1925-1932, 2015.
- [14] C. Parrott, T. J. Dodd, and R. Groß, “Hymod: A 3-DOF Hybrid Mobile and Self-Reconfigurable Modular Robot and its Extensions,” Proc. of Distributed Autonomous Robotic Systems, pp. 401-414, 2018.
- [15] H. Kurokawa, K. Tomita, A. Kamimura, S. Kokaji, T. Hasuo, and S. Murata, “Distributed Self-Reconfiguration of M-TRAN III modular robotic system,” The Int. J. of Robotics Research, Vol.27, No.3-4, pp. 373-386, 2008.
- [16] S. Li, R. Batra, D. Brown, H. D. Chang, N. Ranganathan, C. Hoberman, D. Rus, and H. Lipson, “Particle robotics based on statistical mechanics of loosely coupled components,” Nature, Vol.567, pp. 361-365, 2019.
- [17] M. Shimizu and A. Ishiguro, “An amoeboid modular robot that exhibits real-time adaptive reconfiguration,” Proc. of 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1496-1501, 2009.
- [18] J. B. Song and K. S. Byun, “Steering control algorithm for efficient drive of a mobile robot with steerable omni-directional wheels,” J. of Mechanical Science and Technology, Vol.23, No.10, pp. 2747-2756, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.