Paper:
Development of a Bimanual Wearable Force Feedback Device with Pneumatic Artificial Muscles, MR Fluid Brakes, and Sensibility Evaluation Based on Pushing Motion
Ryunosuke Sawahashi*, Jonah Komatsu*, Rie Nishihama**, Manabu Okui***, and Taro Nakamura***
*Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University
1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan
**Research and Development Initiative, Chuo University
1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan
***Department of Precision Mechanics, Chuo University
1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan

In a virtual reality (VR) space, wearing a head-mounted display can help with the visualization of objects; however, users cannot experience realistic tactile sensations. Recently, several force feedback devices have been developed, including wearable devices that use straight-fiber-type pneumatic muscles and magnetorheological fluids. This allows the devices to render elastic, frictional, and viscous forces during spatially unrestricted movement. Nevertheless, a problem remains in that previous devices could handle many bilateral upper limb movement tasks. Therefore, this study aims to develop a device that can handle movements that interact with both arms. Based on experiments concerning the pushing motion in a VR space, the influence of the pseudo force sense was determined to not be small. In addition, we confirmed that the force sensation presented by this system was more realistic when the robot was operated with both arms than when operated with the right arm.
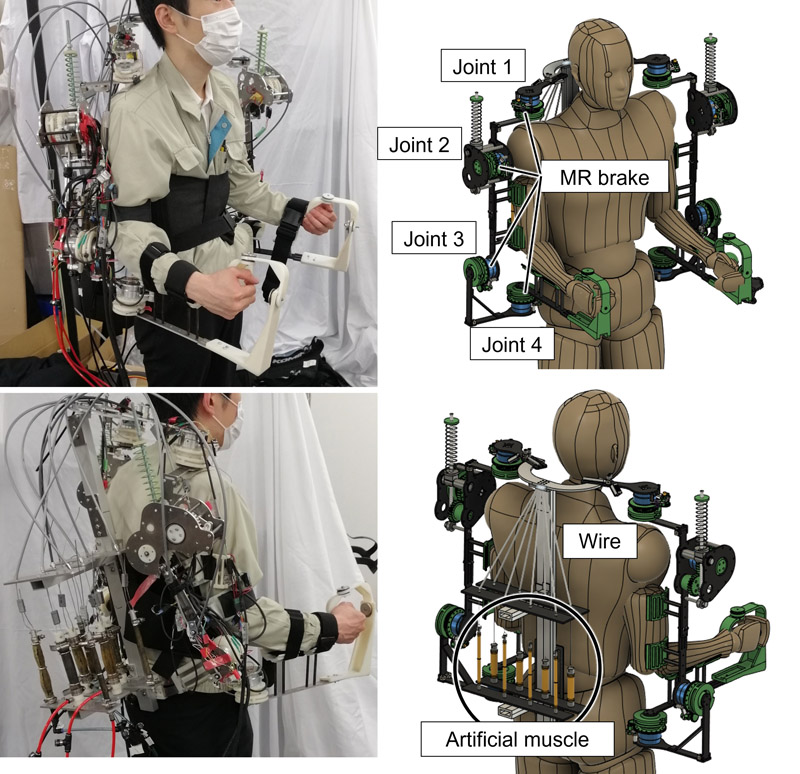
A bimanual wearable haptic device
- [1] I. Kossyk, J. Dorr, and K. Kondak, “Design and evaluation of a wearable haptic interface for large workspaces,” Proc. of the 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4674-4679, 2010. https://doi.org/10.1109/IROS.2010.5650890
- [2] A. Frisoli, F. Rocchi, S. Marcheschi, A. Dettori, F. Salsedo, and M. Bergamasco, “A new force-feedback arm exoskeleton for haptic interaction in virtual environments,” Proc. 1st Joint Eurohaptics Conf. Symp. Haptic Interfaces Virtual Environ. Teleoperator Syst., Pisa, Italy, pp. 195-201, 2005. https://doi.org/10.1109/WHC.2005.15
- [3] C. Carignan, J. Tang, and S. Roderick, “Development of an exoskeleton haptic interface for virtual task training,” Proc. of the 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, St. Louis, MO, USA, December, pp. 3697-3702, 2009. https://doi.org/10.1109/IROS.2009.5354834
- [4] M. Mihelj, T. Nef, and R. Riener, “ARMin II – 7 DoF rehabilitation robot: mechanics and kinematics,” Proc. of the 2007 IEEE Int. Conf. on Robotics and Automation, Roma, Italy, April, pp. 4120-4125, 2007. https://doi.org/10.1109/ROBOT.2007.364112
- [5] J. C. Perry, J. Rosen, and S. Burns, “Upper-Limb Powered Exoskeleton Design,” IEEE/ASME Trans. on Mechatronics, Vol.12, No.4, pp. 408-417, 2007. https://doi.org/10.1109/TMECH.2007.901934
- [6] P. Letier, M. Avraam, S. Veillerette, M. Horodinca, M. De Bartolomei, A. Schiele, and A. Preumont, “SAM: A 7-DOF portable arm exoskeleton with local joint control,” Proc. of the 2008 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Nice, France, September, pp. 3501-3506, 2008. https://doi.org/10.1109/IROS.2008.4650889
- [7] X. Cui, W. Chen, X. Jin, and S. K. Agrawal, “Design of a 7-DOF Cable-Driven Arm Exoskeleton (CAREX-7) and a Controller for Dexterous Motion Training or Assistance,” IEEE/ASME Trans. on Mechatronics, Vol.22, No.1, pp. 161-172, 2017. https://doi.org/10.1109/TMECH.2016.2618888
- [8] S. Saga and N. Ikeda, “Dynamic Brake Control for a Wearable Impulsive Force Display by a String and a Brake System,” J. Robot. Mechatron., Vol.33, No.5, pp. 1075-1081, 2021.
- [9] S. Balasubramanian, R. Wei, M. Perez, B. Shepard, E. Koeneman, J. Koeneman, and J. He, “RUPERT: An Exoskeleton Robot for Assisting Rehabilitation of Arm Functions,” Proc. of Virtual Rehabilitation 2008, pp. 163-167, 2008. https://doi.org/10.1109/ICVR.2008.4625154
- [10] T. Takeda and H. Oishi, “Development of Upper Extremity Orthosis by Pneumatic Control and It’s Applications,” IPSJ SIG Technical Reports HCI, Vol.1992, No.69, pp. 63-70, 1992 (in Japanese).
- [11] H. Li, K. Kawashima, K. Tadano, S. Ganguly, and S. Nakano, “Achieving haptic perception in forceps’ manipulator using pneumatic artificial muscle,” IEEE/ASME Trans. on Mechatronics, Vol.18, No.1, pp. 74-85, 2013. https://doi.org/10.1109/TMECH.2011.2163415
- [12] D. Sasaki, T. Noritsugu, M. Takaiwa, K. Nakanishi, and H. Maruta, “Development of Wearable Master-Slave Device for Upper Limb Constructed with Pneumatic Rubber Muscles,” J. of the Robotics Society of Japan, Vol.28, No.2, pp. 208-214, 2020.
- [13] D. Ryu et al., “Development of Wearable Haptic System for Tangible Studio to Experience a Virtual Heritage Alive,” Proc. ot the 2006 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 466-471, 2006. https://doi.org/10.1109/IROS.2006.282266
- [14] H. G. Gang, S.-B. Choi, and J. W. Sohn, “Experimental Performance Evaluation of a MR Brake-Based Haptic System for Teleoperation,” Frontiers in Materials, Vol.6, No.25, 2019.
- [15] W. H. Li, B. Liu, P. B. Kosasih, and X. Z. Zhang, “A 2-DOF MR actuator joystick for virtual reality applications,” Sensors and Actuators A: Physical, Vol.137, No.2, pp. 308-320, 2007. https://doi.org/10.1016/j.sna.2007.03.015
- [16] Y. Yamaguchi, J. Furusho, S. Kimura, and K. Koyanagi, “2-D Force Display System Using MR actuators,” J. of the Robotics Society of Japan, Vol.23, No.3, pp. 352-359, 2005.
- [17] M. Okui, S. Iikawa, Y. Yamada, and T. Nakamura, “Variable Viscoelastic Joint System and Its Application to Exoskeleton,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vancouver, BC, pp. 3897-3902, 2017.
- [18] M. Okui, M. Kobayashi, Y. Yamada, and T. Nakamura, “Delta-type 4-dof force-feedback device composed of pneumatic artificial muscles and magnetorheological clutch and its application to lid opening,” Smart Materials and Structures, Vol.28, No.6, 2019. https://doi.org/10.1088/1361-665X/ab192a
- [19] R. Suzuki, M. Egawa, Y. Yamada, and T. Nakamura, “Development of 1-DOF Wearable Force Feedback Device with MR brakes and a Pneumatic Artificial Muscle and Evaluation of the device in an Augmented Reality Space,” Trans. of the Virtual Reality Society of Japan, Vol.23, No.1, pp. 45-54, 2018 (in Japanese). https://doi.org/10.18974/tvrsj.23.1_45
- [20] R. Sawahashi, Y. Onozuka, T. Tanaka, M. Okui, and T. Nakamura, “Quantitative Evaluation of a Wearable Feedback Device with a Clutch Mechanism Using Artificial Muscle Contraction,” Proc. of Japan Fluid Power System Society, pp. 22-24, 2020 (in Japanese).
- [21] R. Sawahashi, Y. Onozuka, T. Tanaka, M. Okui, and T. Nakamura, “Development of a Wearable Four-Degrees-of-Freedom Force Feedback Device with a Clutch Mechanism Using Artificial Muscle Contraction,” 2021 IEE Int. Conf. on Industrial Technology (ICIT), pp. 47-54, 2021. https://doi.org/10.1109/ICIT46573.2021.9453574
- [22] A. Shumway-Cook and M. Woollacott, “Motor control: translating research into clinical practice. Philadelphia,” Lippincott Williams & Wilkins, 2006.
- [23] S. Waller and J. Whitall, “Bilateral arm training: Why and who benefits?,” NeuroRehabilitation, Vol.23, No.1, pp. 29-41, 2008.
- [24] M. Trlep, M. Mihelj, and M. Munih, “Skill transfer from symmetric and asymmetric bimanual training using a robotic system to single limb performance,” J. of NeuroEngineering Rehabilitation, Vol.9, No.43, 2012.
- [25] Z. Li, B. Huang, A. Ajoudani, C. Yang, C.-Y. Su, and A. Bicchi, “Asymmetric Bimanual Control of Dual-Arm Exoskeletons for Human-Cooperative Manipulations,” IEEE Trans. on Robotics, Vol.34, No.1, pp. 264-271, 2018. https://doi.org/10.1109/TRO.2017.2765334
- [26] Y. Tanaka, S. Shiraki, K. Katayama, K. Minamizawa, and D. Prattichizzo, “Bilaterally Shared Haptic Perception for Human-Robot Collaboration in Grasping Operation,” J. Robot. Mechatron., Vol.33, No.5, pp. 1104-1116, 2021. https://doi.org/10.20965/jrm.2021.p1104
- [27] A. Lecuyer, S. Coquillart, A. Kheddar, P. Richard, and P. Coiffet, “Pseudo-haptic feedback: can isometric input devices simulate force feedback?,” Proc. IEEE Virtual Reality 2000 (Cat. No.00CB37048), New Brunswick, NJ, USA, pp. 83-90, 2000. https://doi.org/10.1109/VR.2000.840369
- [28] Y. Ujitoko, T. Narumi, Y. Ban, T. Tanikawa, K. Hirota, and M. Hirose, “Presenting Pseudo-resistive Force on Touch Interfaces by Controlling a Displacement between the Finger and Background Images,” J. of the Virtual Reality Society of Japan, Vol.22, No.3, pp. 305-313, 2017 (in Japanese).
- [29] Y. Onozuka, M. Oba, M. Okui, and T. Nakamura, “Rendering friction and viscosity using a wearable 4 degrees of freedom force feedback device with magnetorheological fluid clutches and pneumatic artificial muscles,” 45th Annual Conf. of the IEEE Industrial Electronics Society (IECON 2019), pp. 705-710, 2019. https://doi.org/10.1109/IECON.2019.8927514
- [30] T. Nakamura, “Experimental compensations between McKibben type artificial muscles and straight fibers type artificial muscles,” SPIE Int. Conf. on Smart Structures, Devices and Systems III, Vol.6414, 2007. https://doi.org/10.1117/12.698845
- [31] H. Maeda, H. Nagai, H. Saito, and T. Nakamura, “Position and compliance control of an artificial muscle manipulator using a mechanical equilibrium model,” 34th Annual Conf. of IEEE Industrial Electronics, Orlando, pp. 3431-3436, 2008. https://doi.org/10.1109/IECON.2008.4758512
- [32] B. J. Park, C. W. Park, S. W. Yang, H. M. Kim, and H. J. Choi, “Core-Shell Typed Polymer Coated-Carbonyl Iron Suspensions and Their Magnetorheology,” J. of Physics: Conference Series, Vol.149, No.1, 2009.
- [33] R. Sawahashi, I. Mai, R. Nishihama, M. Okui, and T. Nakamura, “Development of a Bimanual Wearable Force Feedback Device Composed of Pneumatic Artificial Muscles and Magnetorheological Fluid Brakes,” 2021 JSME Conf. on Robotics and Mechatronics, 1A1-H04, 2021 (in Japanese).
- [34] S. Iwata, K. Tanida, K. Shimato, K. Ohnishi, and Y. Yamada, “Bilateral control using compression type mechanical gravity canceller,” IEEE 13th Int. Workshop on Advanced Motion Control, Yokohama, Japan, March, pp. 296-301, 2014. https://doi.org/10.1109/AMC.2014.6823298
- [35] R. Sawahashi, M. Okui, and T. Nakamura, “An Experiment of Rendering Elasticity by Bimanual Wearable Force Feedback Device Composed of Pneumatic Artificial Muscles and Magnetorheological Fluid Brakes,” SI2021, 2F2-05, pp. 1932-1936, 2021 (in Japanese).
- [36] E. Cattan, A. R. Capellan, P. Perrier, and F. Berard, “Reducing Latency with a Continuous Prediction: Effects on Users’ Performance in Direct-Touch Target Acquisitions,” Interactive Tabletops & Surfaces (ITS’15), pp. 205-214, 2015. https://doi.org/10.1145/2817721.2817736
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.