Paper:
Study on an Add-on Type Electric Wheelchair Using Active Caster with the Differential Mechanism
Taisei Nakayama* and Masayoshi Wada**
*Tokyo University of Agriculture and Technology
2-24-16 Naka-cho, Koganei, Tokyo 184-8588, Japan
**Tokyo University of Science
6-3-1 Niijyuku, Katsushika-ku, Tokyo 125-8585, Japan

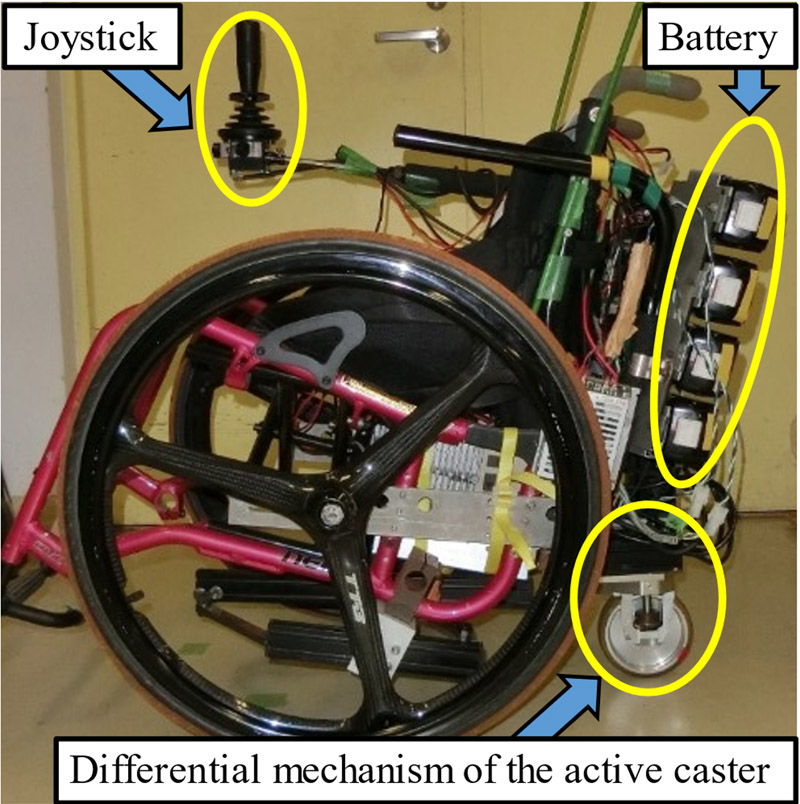
This study developed an electric-powered manual wheelchair with a differential-drive active caster mounted at the rear of the wheelchair. The active caster has two axes: a caster wheel axis and a steering axis, and the coordinated control of these axes enables the wheel-mounted part to move in all directions. Conventional active casters have separate motors for the steering and wheel axes, and only the motor on the wheel axis operates when the wheelchair moves straight ahead, resulting in a low drive efficiency. Therefore, we developed a differential-drive-type active caster that uses a differential-drive mechanism. The differential-drive-type active caster uses the sum of the rotations of the two motors to move the steering axis, and the difference to move the wheel axis. Therefore, the two motors always operate, thus the drive efficiency is higher than that of a conventional type. However, we found that the two motors interfere with each other owing to their structure, making it difficult to stabilize the steering axis when speed increases. A control method was developed to solve this problem. Through verification experiments, we demonstrated the ability of the wheelchair to move at speeds over 6 km/h, the legal speed limit in Japan, the improved stability of the steering axis, and the accuracy of its omnidirectional movement. Additionally, to reduce the wobble that occurs when the electric-powered manual wheelchair moves straight ahead, we introduced a yaw-rate feedback to the joystick input system. The feedback was then verified in a lane-change experiment, confirming the wobble reduction.
3-wheeled add-on type electric wheelchair
- [1] T. Kimura, “Electric cart for elderly person,” JP patent P2016-208591A, 2016.
- [2] W. B. Mortenson and J. Kim, “Scoping review of mobility scooter-related research studies,” J. of Rehablitaion Research and Development, Vol.53, No.5, pp. 531-540, 2016.
- [3] G. Quaglia, M. Nisi, W. Franco, and L. Bruzzone, “Dynamic Simulation of an Electric Stair-Climbing Wheelchair,” Int. J. Automation Technol., Vol.11, No.3, pp. 472-480, 2017.
- [4] W. J. Tao, J. Y. Xu, and T. Liu, “Electric-powered wheelchair with stair-climbing ability,” Int. J. of Advanced Robotic Systems, Vol.14, No.4, 2017.
- [5] S. Nakajima, “Development of a Series of RT-Mover, Which is a Four-Wheel Type of Mobile Platform with an Ability of Negotiating Obstacles,” J. Robot. Mechatron., Vol.27, No.5, pp. 587-589, 2015.
- [6] Y. K. Wu, H. Y. Liu, A. Kelleher, J. Pearlman, D. Ding, and R. A. Cooper, “Power seat function usage and wheelchair discomfort for power wheelchair users,” J. of Spinal Cord Medicine, Vol.40, No.1, pp. 62-69, 2017.
- [7] T. Morita, T. Ikeda, and T. Aoki, “Development of an electric wheelchair that can run on slopes and neven terrain,” ROBOMECH, 2P1-J10, 2021 (in Japanese).
- [8] K. Tobita, Y. Shikanai, and K. Mima, “Study on Automatic Operation of Manual Wheelchair Prototype and Basic Experiments,” J. Robot. Mechatron., Vol.33, No.1, pp. 69-77, 2021.
- [9] K. Itou, “Development history and future prospects of electric wheelchair units,” LIFE, OS3-1-3, 2012 (in Japanese).
- [10] D. Y. Kim, Y. H. Kim, K. S. Kim, and J. M. Kim, “A Control Method for Power-Assist Devices using a BLDC Motor for Manual Wheelchairs,” J. of Power Electronics, Vol.16, No.2, pp. 798-804, 2016.
- [11] M. Komori, K. Matsuda, T. Terakawa, and F. Tateoka, “Active omni wheel capable of active motion in arbitrary,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.10, No.6, 2016.
- [12] T. Takenaka, M. Hirano, H. Izumi, K. Kuwabara, T. Koyama, and S. Kobashi, “Omni-directional drive device and omni-directional vehicle using the same,” US patent 8342270B2, 2008.
- [13] J. Shen and D. Hong, “OmBURo: A Novel Unicycle Robot with Active Omnidirectional Wheel,” IEEE Int. Conf. on Robotics and Automation, 2020.
- [14] J. Park, M. Kim, H. G. Jang, D. Y. Jung, and M. P. Jong, “Design and control of a permanent magnet spherical wheel motor,” Electronics and Telecommunications Research Institute J., Vol.41, No.6, pp. 838-849, 2019.
- [15] U. Nagarajan, G. Kantor, and R. Hollis, “The Ballbot: An Omnidirectional Balancing Mobile Robot,” Int. J. of Robotics Research, Vol.33, No.6, pp. 917-930, 2014.
- [16] M. Wada and S. Mori, “Holonomic and omnidirectional vehicle with conventional tires,” IEEE Int. Conf. on Robotics and Automation, Vol.4, pp. 3671-3676, 1996.
- [17] Y. Ueno, T. Ohno, K. Terashima, H. Kitagawa, K. Funato, and K. Kakihara, “Novel differential drive steering system with energy saving and normal tire using spur gear for an omni-directional mobile robot,” IEEE Int. Conf. on Robotics and Automation, pp. 3763-3768, 2010.
- [18] W. Chung, C. B. Moon, C. Jung, and J. Jin, “Design of the Dual Offset Active Caster Wheel for Holonomic Omni-directional Mobile Robots,” Int. J. of Advanced Robotic Systems, Vol.7, pp. 101-106, 2010.
- [19] S. Nasu and M. Wada, “Mechanical design of an active-caster robotic drive with dual-wheel and differential mechanism,” 41st Annual Conf. of the IEEE Industrial Electronics Society (IECON 2015), pp. 5345-5350, 2015.
- [20] K. Kato and M. Wada, “Kinematic analysis and simulation of active-caster robotic drive with ball transmission (ACROBAT-S),” Advanced Robotics, Vol.31, No.7, pp. 355-367, 2017.
- [21] Y. Munakata, A. Tanaka, and M. Wada, “An Active-caster Drive System for Motorizing a Manual Wheelchair,” IEEE Int. Conf. on Mechatronics and Automation, pp. 1161-1166, 2013.
- [22] T. Murakami, Y. Tani, and M. Wada, “Study on Control Method for Improving Straightness of Front-Wheel-Drive Wheelchair,” 44th Annual Conf. of the IEEE Industrial Electronics Society (IECON 2018), pp. 4318-4323, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.