Paper:
Development of a Novel Rollator Equipped with a Motor-Driven Chest Support Pad and Investigation of its Effectiveness
Jian Huang and Noriho Koyachi
Faculty of Engineering, Kindai University
1 Takaya Umenobe, Higashi-Hiroshima City, Hiroshima 739-2116, Japan

In recent years, a rapid increase in bedridden elderly, due to cerebral strokes and other diseases, has become a social problem due to soaring medical costs and heavy burden of long term care support. Therefore, development of walk rehabilitation devices for the elderly, suffered from cerebral strokes, is strongly expected. In the research so far, the authors have developed a rollator with a chest support pad that can rotate freely with one degree of freedom, and the effectiveness of its walk assistance was evaluated. In this study, a novel rollator using a motor-driven chest support pad was developed. A compact system to combine data collect system and motor control was configured. Walk measurements for six subjects were conducted using the developed rollator. The relationship between the movements of the lower limbs and rotation of the motor driven chest support pad was investigated. Time series and power spectrum results were analyzed, and the effectiveness of the motor-driven chest support pad on movement of the lower limb during walking was discussed.
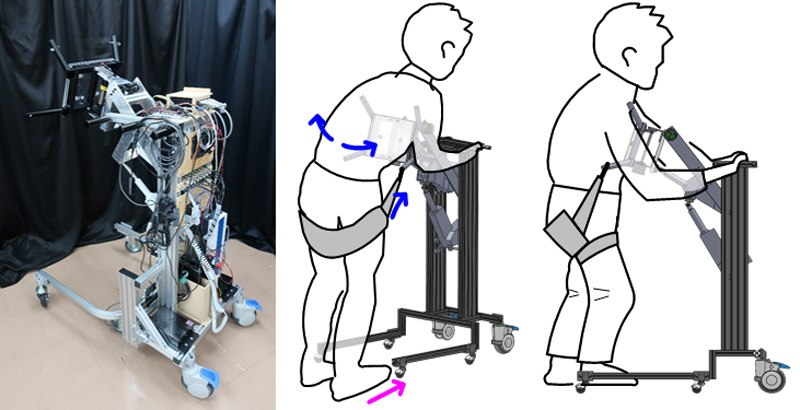
A rollator equipped with a motor-driven chest pad
- [1] Ministry of Internal Affairs and Communications, “2013 White Paper,” 2013.
- [2] Y. Sankai, “Leading Edge of Cybernics: Robot Suit HAL,” Proc. SICE-ICASE Int. Joint Conf., pp. 1-2, 2006.
- [3] T. Hayashi, H. Kawamoto, and Y. Sankai, “Control method of robot suit HAL working as operator’s muscle using biological and dynamical information,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3063-3068, 2005.
- [4] A. Sano, “Practive use of walk assistance device ACSIVE derived from passive walking (Walk assistance in daily life),” Proc. of JSME Annual Conf., F113003, 2015 (in Japanese).
- [5] A. Sano, “ACSIVE: A Non-powered Gait Assist Suit Based on Passive Walking,” Neurospinal Society of Japan, Vol.31, No.3, pp. 242-245, 2017 (in Japanese).
- [6] A. Sano, “Unpowered Walking Assistance Device by Using Ingeniously a Gravitational Field,” J. of the Robotics Society of Japan, Vol.38, No.2, pp. 139-142, 2020 (in Japanese).
- [7] A. Watanabe, K. Kawai, K. Sato, Y. Miyazaki, H. Ito, and T. Mori, “Gait changes brought about by continued use of Honda’s stride management assist in patients with stoke-related hemiplegia,” J. of Japanese Physical Therapy Association, Vol.43, No.4, pp. 337-341, 2016 (in Japanese).
- [8] H. Tanaka and M. Hashimoto, “Development of a Non-Exoskeletal Structure for a Robotic Suit,” Proc. of 2014 5th IEEE/RAS&EMBS Int. Conf. on Biomedical Robotics and Biomechatronics (BioRob), pp. 707-712, 2014.
- [9] E. Tanaka, K. Muramatsu, Y. Osawa, K. Watanuki, S. Saegusa, and L. Yuge, “Development of a Walking Assistance Apparatus for Promotion of Exercise,” Proc. 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3711-3716, 2016.
- [10] E. Tanaka, H. Nagayoshi, H. Kondo, K. Muramatsu, and K. Watanuki, “Development of a Walking Assistance Apparatus Including a Torque Limiter in a Gear,” Proc. of the JSME Int. Conf. on Motion and Power Transmissions, I2-02, 2017.
- [11] E. Tanaka, T. Ikehara, H. Yusa, Y. Sato, T. Sakurai, S. Saegusa, K. Ito, and L. Yuge, “Walking-Assistance Apparatus as a Next-Generation Vehicle and Movable Neuro-Rehabilitation Training Appliance,” J. Robot. Mechatron., Vol.24, No.5, pp. 851-865, 2012.
- [12] Y. Shimizu, T. Suzuki, E. Saitoh, Y. Muraoka, S. Tanabe, T. Takemitsu, A. Uno, M. Katoh, and M. Ozeki, “A Preliminary Report about a new Robot WPAL (Wearable Power-Assist Locomotor) for Paraplegic Gait Reconstruction,” The Japanese J. of Rehabilitation Medicine, Vol.46, No.8, pp. 527-533, 2009 (in Japanese).
- [13] J. Inoue, I. Hanazaki, K. Kawamura, Y. Kijima, and T. Fujimoto, “Developing Walker which Use for Crutch Walking Exercises for Hemiplegia without Watching,” IEEE Trans. on Electronics, Information and Systems, Vol.137, No.3, pp. 452-458, 2017.
- [14] R. Han, C. Tao, J. Huang, Y. Wang, H. Yan, and L. Ma, “Design and control of an intelligent walking-aid robot,” Proc. of Int. Conf. of Modeling, Identification Control, pp. 53-58, 2014.
- [15] T. Fukuda, J. Huang, D. Pei, and K. Sekiyama, “Motion control and fall detection of intelligent cane robot,” Intelligent Assistive Robots, Springer Tracts in Advanced Robotics, Vol.106, pp. 317-337, 2015.
- [16] Q. Yan, J. Huang, C. Xiong, Z. Yang, and Z. Yang, “Data-driven human-robot coordination based walking state monitoring with cane-type robot,” IEEE Access, Vol.6, pp. 8896-8908, doi: 10.1109/ACCESS.2018.2806563, 2018.
- [17] J. Solis, D. T. Teshome, and J. P. De la Rosa, “Towards the development of multipurpose assistive vehicle robot for the ambient assisted living,” Proc. of Int. Conf. on Automation Science and Engineering, pp. 1145-1150, 2015.
- [18] J. Solis, “Development of a human-friendly walking assisting robot vehicle designed to provide physical support to the elderly,” Science Direct IFAC-PapersOnLine, Vol.49, Issue 21, pp. 656-661, 2016.
- [19] X. Zhao, Z. Zhu, M. Liu, C. Zhao, Y. Zhao, J. Pan, Z. Wang, and C. Wu, “A Smart Robotic Walker With Intelligent Close-Proximity Interaction Capabilities for Elderly Mobility Safety,” Front Neurorobot, Vol.14, Article No.575889, doi: 10.3389/fnbot.2020.575889, 2020.
- [20] M. Fujie, “Walk Support Robot,” J. of the Robotics Society of Japan, Vol.14, No.5, pp. 628-631, 1996 (in Japanese).
- [21] S. Hirano, E. Saitoh, S. Sonoda, K. Otsuka, N. Itoh, M. Kato, S. Tanabe, H. Konosu, A. Uno, and T. Takemitsu, “Development of rehabilitation robots,” Bulletin of the Japanese Society of Prosthetic and Orthotic Education, Research and Development, Vol.29, No.2, pp. 90-97, 2013 (in Japanese).
- [22] T. Tono, M. Watanabe, and M. Fujie, “Development of control algorithm for synchronously pelvic assist during gait,” Proc. of Conf. Welfare, Wellbeing, Life Support, pp. 532-535, 2010 (in Japanese).
- [23] J. Huang and N. Koyachi, “Measurements of Walking Using a Newly Developed Rollator Having an Free Rotating Chest Pad Integrated with Multiple Sensors,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2P1-P10, 2017 (in Japanese).
- [24] J. Huang and N. Koyachi, “Evaluating the Assistance Effectiveness of a Newly Developed Rollator Mounted with a Freely Rotating Chest Support Pad,” Proc. of The 2017 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1185-1190, 2017.
- [25] J. Huang and N. Koyachi, “Measurements of Walk Using a Rollator Having a Free Rotating Chest Pad,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2A1-E05, 2018 (in Japanese).
- [26] J. Huang, N. Koyachi, and N. Miyano, “Evaluation of a Walking Assistant Rollator Integrated with a Rotating Chest Support Mechanism,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2P1-J05, 2015 (in Japanese).
- [27] J. Huang, N. Koyachi, and N. Miyano, “Evaluating the Assistant Effectiveness of a Walking Rollator Equipped with a Free Rotating Chest Support Mechanism,” Proc. of u-Healthcare 2015, S3-2-4, 2015.
- [28] J. Huang and N. Koyachi, “Evaluation of the Stimulatory Effectiveness of a Rollator Integrated with an Uncontrolled Rotating Chest Pad,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2A2-02A3, 2016 (in Japanese).
- [29] J. Huang and N. Koyachi, “Evaluating the Assistance Effectiveness of a Newly Developed Rollator Mounted with a Freely Rotating Chest Support Pad,” Proc. of The 2016 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1185-1190, 2016.
- [30] J. Huang, H. Ashida, N. Koyachi, and T. Harada, “Walk Measurements Using a Novel Rollator with a Free Rotating Chest Pad and an Analysis of its Effectiveness in Walk Assistance,” Proc. of the 5th IEEE Int. Conf. on Mechatronics System and Robots, pp. 13-17, 2019.
- [31] J. Huang, H. Ashida, R. Abe, N. Koyachi, and T. Harada, “Measurement and Analyses of Walk Test Using a Rollator with a Rotatable Chest Pad,” Proc. of the 37th Annual Conf. of RSJ, 3C3-01, 2019 (in Japanese).
- [32] J. Huang, H. Ashida, Y. He, N. Koyachi, and T. Harada, “Measurements and Analyses of Walk Using a Novel Rollator Equipped with a Rotatable Chest Pad,” J. Robot. Mechatron., Vol.34, No.1, pp. 18-27, 2022.
- [33] H. Ashida, J. Huang, N. Koyachi, and T. Harada, “Development of a Rollator Equipped with an Active Driving Chest Pad,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2P1-M02, 2019 (in Japanese).
- [34] J. Huang, H. Ashida, R. Abe, N. Koyachi, and T. Harada, “Development of a Novel Rollator with an Active Driving Chest Pad to Achieve the Effectiveness of Walk Assitance,” Proc. of The 17th Int. Conf. on Biomedical Engineering (ICBME2019), p. 70, 2019.
- [35] K. Mukai, S. Miyamoto, R. Abe, J. Huang, and N. Koyachi, “Development of a Measurement and Control System for a Rollator Equipped with a Motor Driving Chest Pad,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2P2-D08, 2021 (in Japanese).
- [36] R. Abe, R. Watanabe, N. Koyachi, and J. Huang, “Development of the force measurement system in a rollator with a driven chest pad,” Proc. of SICE System Integration Division Annual Conf., 2C2-10, 2021 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.