Paper:
Data-Driven Model-Free Adaptive Displacement Control for Tap-Water-Driven Artificial Muscle and Parameter Design Using Virtual Reference Feedback Tuning
Satoshi Tsuruhara* and Kazuhisa Ito**
*Mechanical Engineering, Graduate School of Engineering and Science, Shibaura Institute of Technology
307 Fukasaku, Minuma-ku, Saitama 337-8570, Japan
**Department of Machinery and Control Systems, Shibaura Institute of Technology
307 Fukasaku, Minuma-ku, Saitama 337-8570, Japan

A McKibben artificial muscle has strong asymmetric hysteresis characteristics, which depend on the load applied to the muscle. Thus, designing a controller for high-performance displacement is difficult. In a previous study, model predictive control with a servomechanism combining an inverse optimization algorithm with adaptive model matching, and a data-driven model-free adaptive control (MFAC) were introduced. As a result, a high tracking control performance was achieved in both control methods. However, model-based and data-driven approaches require a highly accurate mathematical model and a large number of design parameters, making them time-consuming, respectively. To solve these problems, in the present study, a controller design that requires no precise mathematical model and less design parameter tuning with trial and error was developed by combining conventional MFAC and virtual reference feedback tuning, which is a data-driven control method. Experimental results indicated that important design parameters, such as the initial pseudo-gradient vector and weighting factor, can be readily obtained. Compared with conventional MFAC, higher tracking control performance without overshoot was achieved in transient response, while the same level of control performance was maintained in steady-state response.
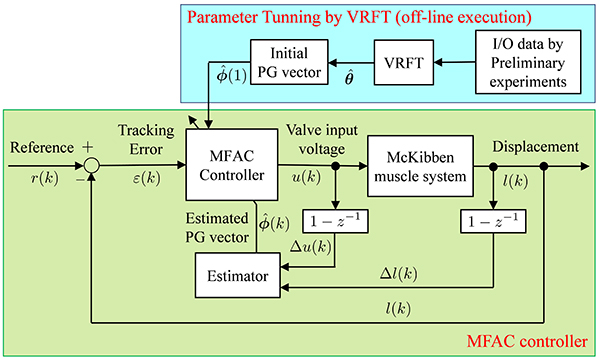
Block diagram of the VRFT-based MFAC
- [1] G. Andrikopoulos, G. Nikolakopoulos, and S. Manesis, “A Survey on Applications of Pneumatic Artificial Muscles,” Proc. of the 19th Mediterranean Conf. on Control and Automation (MED), pp. 1439-1446, 2011.
- [2] S. Miyakawa, “Aqua Drive System: A Technology Using Tap Water and Its Applications,” Proc. of the 8th JFPS Int. Symp. on Fluid Power, pp. 26-37, 2011.
- [3] W. Kobayashi, D. Shujiro, T. Akagi, and K. Ito, “Analysis and Modeling of Tap-Water/Pneumatic Drive McKibben Type Artificial Muscles,” Int. J. of Mechanical Engineering and Robotics Research, Vol.6, No.6, pp. 463-466, 2017.
- [4] J. E. Slightam and M. L. Nagurka, “Theoretical Control-Centric Modeling for Precision Model-Based Sliding Mode Control of a Hydraulic Artificial Muscle Actuator,” J. of Dynamic Systems, Measurement, and Control, Vol.143, No.5, Article No.051010, 2021.
- [5] J. Wu, J. Huang, Y. Wang, and K. Xing, “Nonlinear Disturbance Observer-Based Dynamic Surface Control for Trajectory Tracking of Pneumatic Muscle System,” IEEE Trans. on Control Systems Technology, Vol.22, No.2, pp. 440-455, 2014.
- [6] C.-J. Lin, C.-R. Lin, S.-K. Yu, and C.-T. Chen, “Hysteresis Modelling and Tracking Control for a Dual Pneumatic Artificial Muscle System Using Prandtl–Ishlinskii Model,” Mechatronics, Vol.28, pp. 35-45, 2015.
- [7] R. Inada, K. Ito, and S. Ikeo, “Adaptive Model Predictive Tracking Control of Tap-Water Driven Muscle Using Hysteresis Compensation with Bouc–Wen Model,” Proc. of 16th Scandinavian Int. Conf. on Fluid Power (SICFP19), pp. 263-274, 2019.
- [8] R. Inada, K. Ito, and S. Ikeo, “Modeling and Hysteresis Compensation Using Asymmetric Bouc–Wen Model for Tap-Water Driven Muscle and Its Application to Adaptive Model Predictive Tracking Control,” Proc. of 15th Int. Conf. on Fluid Control, Measurements and Visualization (FLUCOME2019), Article No.144, 2019.
- [9] K. Ito and R. Inada, “Model Predictive Displacement Control Tuning of Tap Water Driven Muscle with Adaptive Model Matching: Numerical Study,” Proc. of Bath/ASME 2020 Symp. on Fluid Power and Motion Control (FPMC2020), Article No.FPMC2020-2711, 2020.
- [10] S. Tsuruhara, R. Inada, and K. Ito, “Model Predictive Displacement Control Tuning for Tap-Water-Driven Muscle by Inverse Optimization with Adaptive Model Matching and Analysis of Contribution,” Proc. of the 10th Int. Conf. on Fluid Power Transmission and Control (ICFP2021), 2021.
- [11] Y. Kawahara, T. Kosaki, and S. Li, “LS-SVM Based Modeling and Model Predictive Control for a Water-Hydraulic Artificial Muscle Actuator,” SICE J. of Control, Measurement, and System Integration, Vol.13, Issue 3, pp. 114-121, 2020.
- [12] T. Kosaki, Y. Kawahara, and S. Li, “A Sliding Mode Controller Using an LS-SVM Model for a Water-Hydraulic Artificial Rubber Muscle,” J. Robot. Mechatron., Vol.32, No.5, pp. 903-910, 2020.
- [13] D. X. Ba, K. K. Ahn, and N. T. Tai, “Adaptive Integral-Type Neural Sliding Mode Control for Pneumatic Muscle Actuator,” Int. J. Automation Technol., Vol.8, No.6, pp. 888-895, 2014.
- [14] Z.-S. Hou and Z. Wang, “From Model-Based Control to Data-Driven Control: Survey, Classification and Perspective,” Information Sciences, Vol.235, pp. 3-35, 2013.
- [15] J. C. Spall and J. A. Cristion, “Model-Free Control of Nonlinear Stochastic Systems with Discrete-Time Measurements,” IEEE Trans. on Automatic Control, Vol.43, Issue 9, pp. 1198-1210, 1998.
- [16] H. Hjalmarsson, S. Gunnarsson, and M. Gevers, “A convergent iterative restricted complexity control design scheme,” Proc. of 33rd IEEE Conf. on Decision and Control, Vol.2, pp. 1735-1740, 1994.
- [17] M. C. Campi, A. Lecchini, and S. M. Savaresi, “Virtual Reference Feedback Tuning: A Direct Method for the Design of Feedback Controllers,” Automatica, Vol.38, Issue 8, pp. 1337-1346, 2002.
- [18] S. Soma, O. Kaneko, and T. Fujii, “A New Method of Controller Parameter Tuning Based on Input-Output Data – Fictitious Reference Iterative Tuning (FRIT) –,” IFAC Proc. Volumes, Vol.37, Issue 12, pp. 789-794, 2004.
- [19] Z. Hou and S. Jin, “A Novel Data-Driven Control Approach for a Class of Discrete-Time Nonlinear Systems,” IEEE Trans. on Control Systems Technology, Vol.19, Issue 6, pp. 1549-1558, 2011.
- [20] Z. Hou and S. Xiong, “On Model-Free Adaptive Control and Its Stability Analysis,” IEEE Trans. on Automatic Control, Vol.64, No.11, pp. 4555-4569, 2019.
- [21] W. Wu, D. Li, W. Meng, J. Zuo, Q. Liu, and Q. Ai, “Iterative Feedback Tuning-Based Model-Free Adaptive Iterative Learning Control of Pneumatic Artificial Muscle,” IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 954-959, 2019.
- [22] R.-C. Roman, M.-B. Radac, R.-E. Precup, and E. M. Petriu, “Data-Driven Model-Free Adaptive Control Tuned by Virtual Reference Feedback Tuning,” Acta Polytechnica Hungarica, Vol.13, No.1, pp. 83-96, 2016.
- [23] L. Duan, Z. Hou, X. Yu, S. Jin, and K. Lu, “Data-Driven Model-Free Adaptive Attitude Control Approach for Launch Vehicle with Virtual Reference Feedback Parameters Tuning Method,” IEEE Access, Vol.7, pp. 54106-54116, 2019.
- [24] S. Tsuruhara, R. Inada, and K. Ito, “Comparison of Model-Free Adaptive Displacement Control and Model Predictive Displacement Control for Tap-Water-Driven Muscle Considering Load Variation During Experiments,” Proc. of the 11th Int. Symp. on Fluid Power (HAKODATE2020), OS4-2-02, 2021.
- [25] Z. Hou and W. Huang, “The Model-Free Learning Adaptive Control of a Class of SISO Nonlinear Systems,” Proc. of the 1997 American Control Conf., Vol.6, pp. 343-344, 1997.
- [26] A. Carè, F. Torricelli, M. C. Campi, and S. M. Savaresi, “A Toolbox for Virtual Reference Feedback Tuning (VRFT),” the 18th European Control Conf. (ECC), pp. 4252-4257, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.