Paper:
Development of Flexible Deformation Mobile Robot Composed of Multiple Units and Pneumatic Self-Excited Valve
Takuya Hada*, Kenta Iguchi**, and Takeshi Aoki*
*Chiba Institute of Technology
2-17-1 Tsudanuma, Narashino, Chiba 275-0016, Japan
**MagnaRecta, Inc.
4-6-10 Nihombashi-honcho, Chuo-ku, Tokyo 103-0023, Japan

In this study, we developed new bending modules and pneumatic self-excited valves. In a previous study, we developed a planar flexible-deformation mobile robot that combines multiple bending modules. The robot moves by a traveling wave, which is periodically generated by pressurizing air to the bending modules. Further, it can move in every direction by simultaneously combining the two directional traveling waves. However, problems such as air leakage from the bending module that constitutes the moving object and the influence of the moving operation owing to the tubes comprising the flow path were identified. To address these problems, new bending modules have been developed. To address air leak issues, we verified the materials used in the bending modules and developed an injection mechanism. To reduce the number of externally connected tubes, we developed new bending modules that could include multiple internal flow paths. In addition, because the mobile robot moves owing to the generation of traveling waves, it is a low-grade operation. However, this requires multiple solenoid valves and electronic circuits. This is useful if traveling waves can be generated by simply supplying air using a pneumatic self-excited valve. In this study, we developed bending modules with multiple internal channels and a pneumatic self-excited valve that utilizes the snap buckling of leaf springs used in the mobile robot.
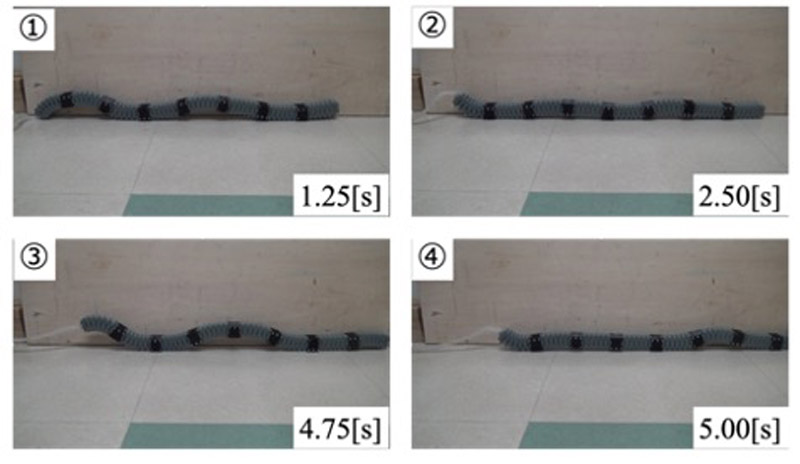
Traveling waves movement (two groups)
- [1] H. Ohno and S. Hirose, “Design of slim slime robot and its gait of locomotion,” Proc. of 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), doi: 10.1109/IROS.2001.976252, 2001.
- [2] M. E. M. Salem, Q. Wang, R. Wen, and M. Xiang, “Design and Characterization of Soft Pneumatic Actuator for Universal Robot Gripper,” 2018 IEEE Int. Conf. on Control and Robots (ICCR), Sep. 15-17, doi: 10.1109/ICCR.2018.8534483, 2018.
- [3] D. Drotman, S. Jadhav, M. Karimi, P. de Zonia, and M. T. Tolley, “3D printed soft actuators for a legged robot capable of navigating unstructured terrain,” 2017 IEEE Int. Conf. on Robotics and Automation (ICRA), May 29 to June 3, doi: 10.1109/ICRA.2017.7989652, 2017.
- [4] T. Umedachi, V. Vikas, and B. A. Trimmer, “Highly deformable 3-D printed soft robot generating inching and crawling locomotions with variable friction legs,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, doi: 10.1109/IROS.2013.6697016, 2013.
- [5] M. Watanabe and H. Tsukagoshi, “Suitable configurations for pneumatic soft sheet actuator to generate traveling waves,” Advanced Robotics, Vol.32, No.7, pp. 363-374, doi: 10.1080/01691864.2017.1392347, 2017.
- [6] K. Sato, R. Hodoshima, and S. Kotosaka, “Study of flat-formed robot – 1st report: Design of configuration and locomotion on mechanical model –,” Proc. of the 2016 JSME Conf. on Robotics and Mechatronics, Yokohama, Japan, June 8-11, doi: https://doi.org/10.1299/jsmermd.2016.1A1-12a1, 2016.
- [7] C. C. Futran, S. Ceron, B. C. Mac Murray, R. F. Shepherd, and K. H. Petersen, “Leveraging fluid resistance in soft robots,” 2018 IEEE Int. Conf. on Soft Robotics (RoboSoft), doi: 10.1109/ROBOSOFT.2018.8405371, 2018.
- [8] Y. Miyaki and H. Tsukagoshi, “Soft simple Compact Valve Inducing Self-excited Vibration Aimed for Mobile Robots Unnecessary for Electricity,” 2018 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), doi: 10.1109/AIM.2018.8452697, 2018.
- [9] Y. Miyaki and H. Tsukagoshi, “Self-Excited Vibration Valve That Induces Traveling Waves in Pneumatic Soft Mobile Robots,” IEEE Robotics and Automation Letters, Vol.5, No.3, doi: 10.1109/LRA.2020.2978455, 2020.
- [10] P. Rothemund, A. Ainla, L. Belding, D. J. Preston, S. Kurihara, Z. Suo, and G. M. Whitesides, “A soft, bistable valve for autonomous control of soft actuators,” Science Robotics, Vol.3, No.16, eaar7986, 2018.
- [11] J. Zou, M. Yang, and G. Jin, “A five-way directional soft valve with a case study: a starfish like soft robot,” 2020 5th Int. Conf. on Automation, Control and Robotics Engineering (CACRE), doi: 10.1109/CACRE50138.2020.9230177, 2020.
- [12] M. Garrad, I. Feeney, A. T. Conn, J. Rossiter, M. P. Nemitz, and H. Hauser, “An all soft, electro-pneumatic controller for soft robots,” 2021 IEEE 4th Int. Conf. on Soft Robotics (RoboSoft), doi: 10.1109/RoboSoft51838.2021.9479381, 2021.
- [13] K. Iguchi, Y. Iwatani, and T. Aoki, “Development mobile body which flexible deformable using pneumatic pressure,” Proc. of the 2018 JSME Conf. on Robotics and Mechatronics, Kitakyushu, Japan, June 2-5, doi: https://doi.org/10.1299/jsmermd.2018.1P1-G12, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.