Paper:
Development of Endoskeleton Type Knee Joint Assist Orthosis Using McKibben Type Artificial Muscle
Kiichi Uchiyama*, Takumi Ito**, and Hiroki Tomori*
*Department of Mechanical Systems Engineering, Graduate School of Science and Engineering, Yamagata University
4-3-16 Jonan, Yonezawa, Yamagata 992-8510, Japan
**Department of Mechanical Systems Engineering, Faculty of Engineering, Yamagata University
4-3-16 Jonan, Yonezawa, Yamagata 992-8510, Japan

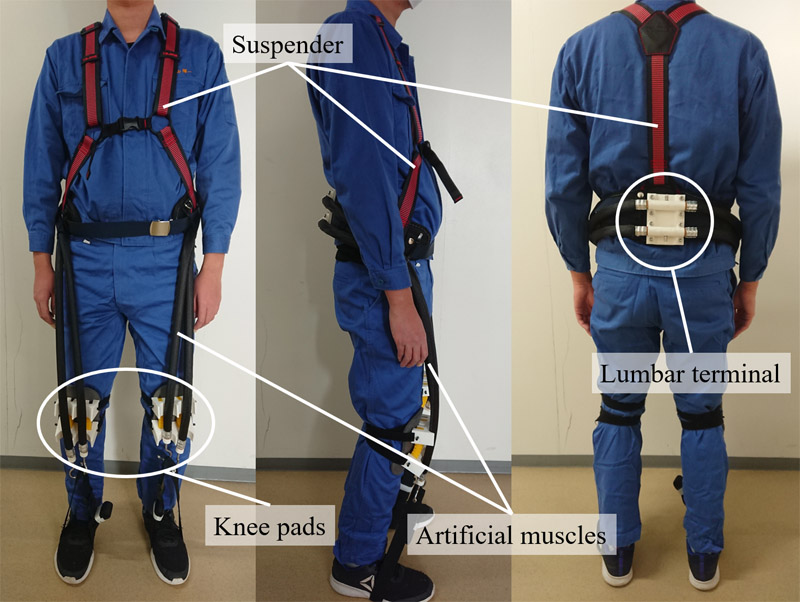
The Japanese agriculture industry, faced with the problem of declining and aging farmers, has keenly called for the development of body assist orthoses for aiding agricultural workers. Therefore, in this study, we propose an endoskeleton-type knee joint assist orthosis for assisting knee joints in half-sitting postures or crouching postures. The proposed endoskeleton-type knee joint assist orthosis uses two McKibben-type artificial muscles per leg and four in total, placed from the waist to the foot along the forward part of the leg to generate assisting power. With the proposed orthosis in use, the contraction forces generated by the McKibben-type artificial muscles are converted into torque via the knees to assist the knee joints. This paper first presents the appearance of the prototyped endoskeleton-type knee joint assist orthosis, and then describes its components and the McKibben-type artificial muscles. To verify its actual effects on muscles, we conducted fitting experiments using a surface myoelectric electrometer to determine its assisting effects; these effects were found on certain experimental subjects, but there were no tangible effects on others. The experimental results suggest that the prototyped endoskeleton-type knee joint assist orthosis requires further improvement.
Endoskeleton type knee joint assist orthosis
- [1] X. Wang, T. A. Perry, N. Arden, L. Chen, C. M. Parsons, C. Cooper, L. Gates, and D. J. Hunter, “Occupational Risk in Knee Osteoarthritis: A Systematic Review and Meta-Analysis of Observational Studies,” American College of Rheumatology, Arthritis Care & Research, Vol.72, No.9, pp. 1213-1223, 2020.
- [2] Y. Kikuchi, “Work Load on Farm-work,” J. of the Japanese Society of Agricultural Machinery, Vol.72, No.2 pp. 100-103, 2010 (in Japanese).
- [3] A. Ishikawa, R. Fukaya, A. Ono, Y. T. Ikeda, and M. Nakamura, “Mini-Tomato Farming Tasks and their Perceived Fatigues,” The Japanese J. of Ergonomics, Vol.29, pp. 188-189, 1993 (in Japanese).
- [4] Y. Muramatsu, H. Kobayashi, Y. Sato, H. Jiaou, T. Hashimoto, and H. Kobayashi, “Quantitative Performance Analysis of Exoskeleton Augmenting Devices – Muscle Suit – for Manual Worker,” Int. J. Automation Technol., Vol.5, No.4, pp. 559-567, 2011.
- [5] S. Mamiya, T. Takahashi, and N. Uchiyama, “Design and Experimental Verification of a Pantograph-Based Mechanism for Lower Limb Load Reduction by Compensating for Upper Body Weight,” J. Robot. Mechatron., Vol.30, No.1, pp. 33-42, 2018.
- [6] M. Yokota and M. Takaiwa, “Development of Non-Wearing Type Pneumatic Power Assist Device – Basic Concept and Performance Evaluation –,” J. Robot. Mechatron., Vol.32, No.5, pp. 1052-1060, 2020.
- [7] Y.-T. Liao, T. Ishioka, K. Mishima, C. Kanda, K. Kodama, and E. Tanaka, “Development and Evaluation of a Close-Fitting Assistive Suit for Back and Arm Muscle – e.z.UP® –,” J. Robot. Mechatron., Vol.32, No.1, pp. 157-172, 2020.
- [8] Y. Imamura, T. Tanaka, Y. Suzuki, K. Takizawa, and M. Yamanaka, “Analysis of Trunk Stabilization Effect by Passive Power-Assist Device,” J. Robot. Mechatron., Vol.26, No.6, pp. 791-798, 2014.
- [9] D. Sasaki, T. Noritsugu, H. Yamamoto, and M. Takaiwa, “Development of Power Assist Glove using Pneumatic Artificial Rubber Muscle,” J. of the Robotics Society of Japan, Vol.24, No.5, pp. 640-646, 2006 (in Japanese).
- [10] T. Nakamura, “Variable Stiffness Mechanism using Pneumatic Artificial Muscle Actuator,” J. of the Robotics Society of Japan, Vol.31, No.6, pp. 572-576, 2013 (in Japanese).
- [11] H. Inose, S. Mohri, Y. Yamada, K. Yokoyama, I. Kikutani, and T. Nakamura, “Verification of Effective Assistance by Endoskeleton-type Power Assist Suit based on Musculoskeletal Simulation,” J. of the Robotics Society of Japan, Vol.35, No.7, pp. 557-565, 2017 (in Japanese).
- [12] H. Arakawa, S. Mohri, Y. Yamada, K. Yokoyama, I. Kikutani, and T. Nakamura, “Proposal of Non-Rotating Joint Drive Type Power Assist Suit for Lower Limbs Considering Squat Lifting,” J. Robot. Mechatron., Vol.30, No.5, pp. 752-761, 2018.
- [13] T. Noritsugu, “Development of Pneumatic Rubber Artificial Muscle and Its Application to Human Assist Robot,” J. of the Japan Society of Applied Electromagnetics and Mechanics, Vol.14, No.2. pp. 186-190, 2006 (in Japanese).
- [14] E. Yagi, D. Harada, and M. Kobayashi, “Development of an Upper Limb Power Assist System Using Pneumatic Actuators for Farming Lift-Up Motion,” Trans. of the Japan Society of Mechanical Engineers C, Vol.75, No.755, pp. 2036-2043, 2009 (in Japanese).
- [15] J. Kohara, “Ideas from ergonomics, The quest for quality life (Ningenkougaku karano hassou kuoritexi raihu no tankyu),” Kodansha Ltd., 1982 (in Japanese).
- [16] K. Matsumoto and H. Daimoto, “Evaluation of load during pedaling exercise using surface EMG,” Yamaha Motor Technical Review, No.46, pp. 127-138, 2010 (in Japanese).
- [17] T. Kizuka, T. Masuda, T. Kiryu, and T. Sadoyama, “Biomechanism Library Practical Usage of Surface Electromyogram,” Tokyo Denki University Press, 2006 (in Japanese).
- [18] E. Yagi, M. Sato, K. Sano, T. Mitsui, and H. Mabuchi, “Verification tests of an electrically actuated power assist suit for walking and lifting motion,” Trans. of the JSME, Vol.81, No.830, p. 14-00432, doi: 10.1299/transjsme.14-00432, 2015 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.