Paper:
Low-Voltage Activation Based on Electrohydrodynamics in Positioning Systems for Untethered Robots
Keita Abe*, Yumeta Seki**, Yu Kuwajima**, Ayato Minaminosono**, Shingo Maeda**, and Hiroki Shigemune*
*Active Functional Devices Laboratory, Shibaura Institute of Technology
3-7-5 Toyosu, Koto-ku, Tokyo 135-8548, Japan
**Smart Materials Laboratory, Shibaura Institute of Technology
3-7-5 Toyosu, Koto-ku, Tokyo 135-8548, Japan

In recent years, untethered soft robots, free of the lines that restrict their mobility, have been studied extensively. Our research team has been focusing on the electrohydrodynamic phenomena (EHD) as a driving mechanism for untethered robots. EHD is a phenomenon in which a flow is generated by applying a high voltage to a dielectric liquid. We propose a method to drive a robot in an untethered manner using EHD by vertically stacking two types of liquids: conductive and dielectric. This method is simpler, more energy-efficient, and quieter than conventional systems. Although a lower voltage would prevent the enlargement of the system by limiting the electronic components, the generation of EHD requires a high voltage. Therefore, in this study, to realize the low voltage drive of untethered robots dominated by the electrostatic actuator, we tackled the reduction of the driving voltage by investigating the phenomenon. As a result, we achieved low voltage driving at 15 V and successfully drove with off-the-shelf batteries (18 V). We also investigated the output current flowing through the system to reduce power consumption. Therefore, in addition to improving the energy efficiency of the system, we confirmed that the difference of the generated current depended on the thickness of the dielectric liquid and the concentration of the conductive liquid.
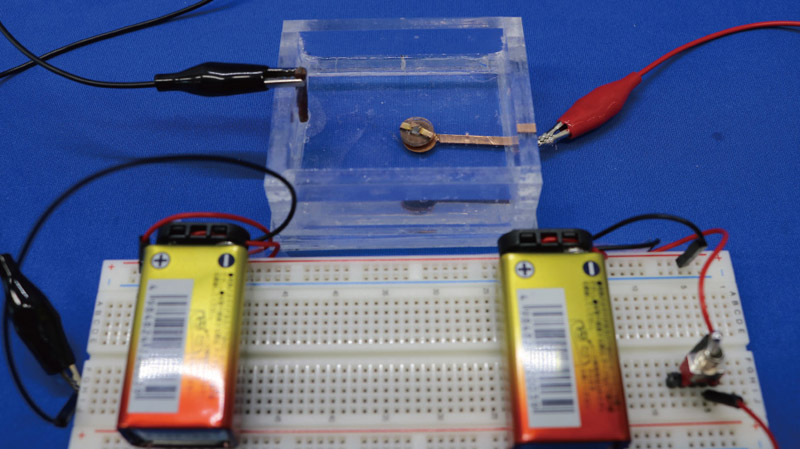
Low-voltage activation of untethered robots
- [1] K. Suzumori, S. Iikura, and H. Tanaka, “Development of flexible microactuator and its applications to robotic mechanisms,” Proc. 1991 IEEE Int. Conf. on Robotics and Automation, pp. 1622-1623, 1991.
- [2] R. F. Shepherd, F. Ilievski, W. Choi, S. A. Morin, A. A. Stokes, A. D. Mazzeo, X. Chen, and G. M. Whitesides, “Multigait soft robot,” Proc. of the National Academy of Sciences, Vol.108, No.51, pp. 20400-20403, 2011.
- [3] C. Laschi, M. Cianchetti, B. Mazzolai, L. Margheri, M. Follador, and P. Dario, “Soft robot arm inspired by the octopus,” Advanced Robotics, Vol.26, No.7, pp. 709-727, 2012.
- [4] C. Lee, M. Kim, Y. J. Kim, N. Hong, S. Ryu, H. J. Kim, and S. Kim, “Soft robot review,” Int. J. of Control, Automation and Systems, Vol.15, No.1, pp. 3-15, 2017.
- [5] S. I. Rich, R. J. Wood, and C. Majidi, “Untethered soft robotics,” Nature Electronics, Vol.1, No.2, pp. 102-112, 2018.
- [6] D. Yang, M. S. Verma, J.-H. So, B. Mosadegh, C. Keplinger, B. Lee, F. Khashai, E. Lossner, Z. Suo, and G. M. Whitesides, “Buckling pneumatic linear actuators inspired by muscle,” Advanced Materials Technologies, Vol.1, No.3, Article No.1600055, 2016.
- [7] S. Licht, E. Collins, M. L. Mendes, and C. Baxter, “Stronger at depth: Jamming grippers as deep sea sampling tools,” Soft Robotics, Vol.4, No.4, pp. 305-316, 2017.
- [8] S. Rosset and H. Shea, “Towards fast, reliable, and manufacturable DEAs: miniaturized motor and Rupert the rolling robot,” Proc. of the Electroactive Polymer Actuators and Devices (EAPAD) 2015, doi: 10.1117/12.2085279, 2015.
- [9] A. Minaminosono, H. Shigemune, Y. Okuno, T. Katsumata, N. Hosoya, and S. Maeda, “A deformable motor driven by dielectric elastomer actuators and flexible mechanisms,” Frontiers in Robotics and AI, Vol.6, No.1, 2019.
- [10] A. Minaminosono, H. Shigemune, T. Murakami, and S. Maeda, “Untethered rotational system with a stacked dielectric elastomer actuator,” Smart Materials and Structures, Vol.30, No.6, Article No.065007, 2021.
- [11] X. Ji, X. Liu, V. Cacucciolo, M. Imboden, Y. Civet, A. E. l. Haitami, S. Cantin, Y. Perriard, and H. Shea, “An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators,” Science Robotics, Vol.4, No.37, Article No.eaaz6451, 2019.
- [12] S. Maeda, Y. Hara, T. Sakai, R. Yoshida, and S. Hashimoto, “Self-walking gel,” Advanced Materials, Vol.19, No.21, pp. 3480-3484, 2007.
- [13] N. Magome and K. Yoshikawa, “Nonlinear oscillation and ameba-like motion in an oil/water system,” The J. of Physical Chemistry, Vol.100, No.49, pp. 19102-19105, 1996.
- [14] A. Suzuki, S. Maeda, Y. Hara, and S. Hashimoto, “Design and motion control of self-propelled droplets,” 2014 IEEE 27th Int. Conf. on Micro Electro Mechanical Systems (MEMS), pp. 310-313, 2014.
- [15] M. Yamada, H. Shigemune, S. Maeda, and H. Sawada, “Temperature and Humidity Dependence of Marangoni Convection and Its Effect on the Self-propulsion of an Oil Droplet,” Chemistry Letters, Vol.50, No.3, pp. 493-496, 2021.
- [16] M. Yamada, H. Shigemune, S. Maeda, and H. Sawada, “Directional and velocity control of active droplets using a rigid-frame,” RSC Advances, Vol.9, No.69, pp. 40523-40530, 2019.
- [17] M. Wehner, R. L. Truby, D. J. Fitzgerald, B. Mosadegh, G. M. Whitesides, J. A. Lewis, and R. J. Wood, “An integrated design and fabrication strategy for entirely soft, autonomous robots,” Nature, Vol.536, No.7617, pp. 451-455, 2016.
- [18] T. Inoue, K. Iwatani, I. Shimoyama, and H. Miura, “Micromanipulation using magnetic field,” Proc. of 1995 IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 679-684, 1995.
- [19] S. Miyashita, S. Guitron, S. Li, and D. Rus, “Robotic metamorphosis by origami exoskeletons,” Science Robotics, Vol.2, No.10, 2017.
- [20] X. Li, Q. Shi, H. Wang, T. Sun, Q. Huang, and T. Fukuda, “Magnetically-guided assembly of microfluidic fibers for ordered construction of diverse netlike modules,” J. of Micromechanics and Microengineering, Vol.27, No.12, Article No.125014, 2017.
- [21] Y. Ochiai, T. Hoshi, and J. Rekimoto, “Pixie dust: graphics generated by levitated and animated objects in computational acoustic-potential field,” ACM Trans. on Graphics, Vol.33, No.4, Article No.85, 2014.
- [22] W. Y. Ng, A. Ramos, Y. C. Lam, I. P. M. Wijaya, and I. Rodriguez, “DC-biased AC-electrokinetics: a conductivity gradient driven fluid flow,” Lab on a Chip, Vol.11, No.24, pp. 4241-4247, 2011.
- [23] V. Cacucciolo, H. Shigemune, M. Cianchetti, C. Laschi, and S. Maeda, “Conduction electrohydrodynamics with mobile electrodes: a novel actuation system for untethered robots,” Advanced Science, Vol.4, No.9, Article No.1600495, 2017.
- [24] H. Shigemune, K. Pradidarcheep, Y. Kuwajima, Y. Seki, S. Maeda, and V. Cacucciolo, “Wireless Electrohydrodynamic Actuators for Propulsion and Positioning of Miniaturized Floating Robots,” Advanced Intelligent Systems, Vol.3, No.7, Article No.2100004, 2021.
- [25] H. Shigemune, S. Sugano, J. Nishitani, M. Yamauchi, N. Hosoya, S. Hashimoto, and S. Maeda, “Dielectric elastomer actuators with carbon nanotube electrodes painted with a soft brush,” Actuators, Vol.7, No.3, Article No.51, 2018.
- [26] Y. Seki, Y. Kuwajima, H. Shigemune, Y. Yamada, and S. Maeda, “Optimization of the electrode arrangement and reliable fabrication of flexible EHD pumps,” J. Robot. Mechatron., Vol.32, No.5, pp. 939-946, doi: 10.20965/jrm.2020.p0939, 2020.
- [27] A. Poulin, R. Samuel, and H. Shea, “Printing low-voltage dielectric elastomer actuators,” Applied Physics Letters, Vol.107, No.24, Article No.244104, 2015.
- [28] M. R. Pearson and J. Seyad-Yagoobi, “Experimental study of EHD conduction pumping at the meso-and micro-scale,” J. of Electrostatics, Vol.69, No.6, pp. 479-485, 2011.
- [29] Y. Kuwajima, H. Shigemune, V. Cacucciolo, M. Cianchetti, C. Laschi, and S. Maeda, “Active suction cup actuated by ElectroHydroDynamics phenomenon,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 470-475, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.