Paper:
Robostrich Arm: Wire-Driven High-DOF Underactuated Manipulator
Kenji Misu*1, Masahiro Ikeda*2, Keung Or*2, Mitsuhito Ando*3, Megu Gunji*4, Hiromi Mochiyama*1, and Ryuma Niiyama*2
*1University of Tsukuba
1-1-1 Tennodai, Tsukuba, Ibaraki 305-8577, Japan
*2The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
*3Ritsumeikan University
1-1-1 Noji-higashi, Kusatsu, Shiga 525-8577, Japan
*4Toyo University
1-1-1 Izumino, Itakura-machi, Ora-gun, Gunma 374-0113, Japan

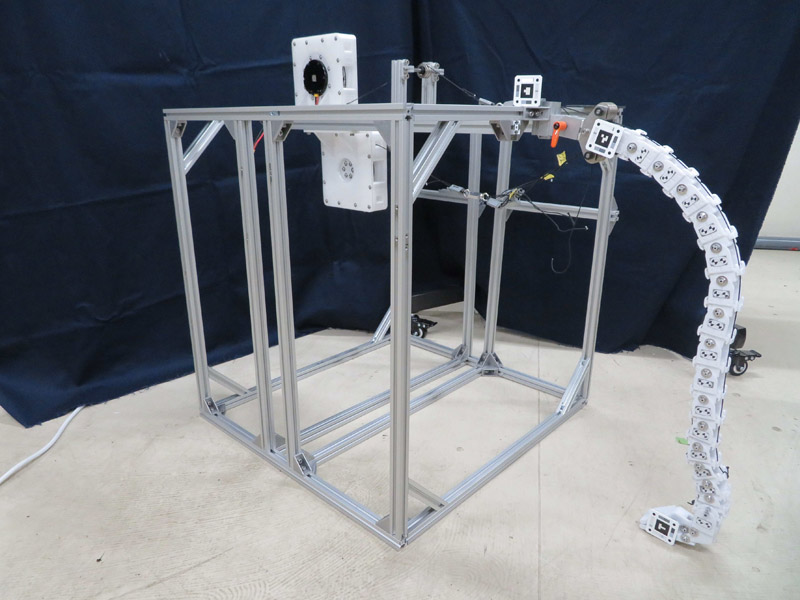
We propose a wire-driven robotic arm inspired by the ostrich neck. It can pick up a small piece of feed from the ground while colliding with it. This arm is named robostrich arm (shortened form of robotic ostrich arm). It consists of a serial chain of 18 rigid bodies connected by free rotational joints that are designed to have angle limitations similar to the bones of a real ostrich. It moves in a vertical plane and is driven by two DC motors through antagonistic wires. The task considered in this study was to lift the arm tip (the “head” of the robostrich arm). The experimental results indicate that the tensioner balance and timing between the two wires are important for achieving the head-up task. This paper indicates the contribution of antagonist muscles to the performance of head-up tasks by high-degree-of-freedom underactuated manipulators in robotics and ostrich necks in biological studies.
Robostrich arm: wire-driven high-DOF underactuated manipulator
- [1] A. H. J. van der Leeuw, R. G. Bout, and G. A. Zweers, “Evolutionary morphology of the neck system in ratites, fowl and waterfowl,” Netherlands J. of Zoology, Vol.52, No.2, pp. 243-262, doi: 10.1163/156854201X00297, 2001.
- [2] V. Anderson and R. Horn, “Tensor arm manipulator design,” ASME Trans., Vol.67, No.DE-57, pp. 1-12, 1967.
- [3] H. Shigeo and Y. Umetani, “The development of soft gripper for the versatile robot hand,” Mechanism and Machine Theory, Vol.13, No.3, pp. 351-359, doi: 10.1016/0094-114X(78)90059-9, 1978.
- [4] S. Ma, S. Hirose, and H. Yoshinada, “Design and experiments for a coupled tendon-driven manipulator,” IEEE Control Systems Magazine, Vol.13, No.1, pp. 30-36, doi: 10.1109/37.184790, 1993.
- [5] M. Takeichi, K. Suzumori, G. Endo, and H. Nabae, “Development of a 20-m-long Giacometti arm with balloon body based on kinematic model with air resistance,” Proc. 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2710-2716, doi: 10.1109/IROS.2017.8206097, 2017.
- [6] G. Endo, A. Horigome, and A. Takata, “Super dragon: A 10-m-long-coupled tendon-driven articulated manipulator,” IEEE Robotics and Automation Letters, Vol.4, No.2, pp. 934-941, doi: 10.1109/LRA.2019.2894855, 2019.
- [7] I. D. Walker, C. Carreras, R. McDonnell, and G. Grimes, “Extension versus bending for continuum robots,” Int. J. of Advanced Robotic Systems, Vol.3, No.2, pp. 303-314, doi: 10.5772/5740, 2006.
- [8] C. Laschi, M. Cianchetti, B. Mazzolai, L. Margheri, M. Follador, and P. Dario, “Soft robot arm inspired by the octopus,” Advanced Robotics, Vol.26, No.7, pp. 709-727, doi: 10.1163/156855312X626343, 2012.
- [9] T. Yukisawa, S. Nishikawa, R. Niiyama, Y. Kawahara, and Y. Kuniyoshi, “Ceiling continuum arm with extensible pneumatic actuators for desktop workspace,” 2018 IEEE Int. Conf. on Soft Robotics (RoboSoft), doi: 10.1109/ROBOSOFT.2018.8404919, 2018.
- [10] K. Suzumori, “New Robotics Pioneered by Fluid Power,” J. Robot. Mechatron., Vol.32, No.5, pp. 854-862, doi: 10.20965/jrm.2020.p0854, 2020.
- [11] K. Suzumori, S. Iikura, and H. Tanaka, “Applying a flexible microactuator to robotic mechanisms,” IEEE Control Systems Magazine, Vol.12, No.1, pp. 21-27, doi: 10.1109/37.120448, 1992.
- [12] M. Carello, C. Ferraresi, and C. Visconte, “A new flexible pneumatic finger for a fruit-harvesting hand,” 7th Int. Symposium on Fluid Control, Measurement and Visualization, Sorrento, 2003.
- [13] B. Mosadegh, P. Polygerinos, C. Keplinger, S. Wennstedt, R. F. Shepherd, U. Gupta, J. Shim, K. Bertoldi, C. J. Walsh, and G. M. Whitesides, “Pneumatic networks for soft robotics that actuate rapidly,” Advanced Functional Materials, Vol.24, No.15, pp. 2163-2170, doi: 10.1002/adfm.201303288, 2014.
- [14] W. Thongking, A. Wiranata, A. Minaminosono, Z. Mao, and S. Maeda, “Soft Robotic Gripper Based on Multi-Layers of Dielectric Elastomer Actuators,” J. Robot. Mechatron., Vol.33, No.4, pp. 968-974, doi: 10.20965/jrm.2021.p0968, 2021.
- [15] K. Koganezawa and Y. Ishizuka, “Novel mechanism of artificial finger using double planetary gear system,” 2008 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, doi: 10.1109/IROS.2008.4650589, 2008.
- [16] N. Fukaya, S. Toyama, T. Asfour, and R. Dillmann, “Design of the TUAT/Karlsruhe humanoid hand,” Proc. 2000 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2000) (Cat. No. 00CH37113). Vol.3, doi: 10.1109/IROS.2000.895225, 2000.
- [17] K. Misu, Y. Endo, M. Ando, M. Gunji, M. Ikeda, K. Or, R. Niiyama, and M. Hiromi, “Development of the Platform for Clarification of Flexibility along the Ostrich Neck,” The 38th Annual Conf. of the Robotics Society of Japan (RSJ), 2A2-04, 2020 (in Japanese).
- [18] M. Akita, S. Nishikimi, K. Kobayashi, K. Kida, Y. Ikemata, and A. Sano, “Rapid Running Motion as Human Like More Dynamic though Tilt the Body Back,” The 35th Annual Conf. of the Robotics Society of Japan (RSJ), 2C2-04, 2017 (in Japanese).
- [19] D. Gordon and A. Christian, “Flexibility along the neck of the ostrich (Struthio camelus) and consequences for the reconstruction of dinosaurs with extreme neck length,” J. of Morphology, Vol.268, No.8, pp. 701-714, doi: 10.1002/jmor.10542, 2007.
- [20] T. Sanada, M. Akita, K. Kobayashi, S. Hattori, M. Suzuki, R. Tanahashi, K. Okamoto, Y. Ikemata, and A. Sano, “Construction of Biped Running System Derived from Human Operation,” Proc. of the 2019 JSME Conf. on Robotics and Mechatronics, Hiroshima, Japan, 1A1-N03, 2019 (in Japanese).
- [21] R. Mukaide, K. Tadakuma, M. Watanabe, Y. Ozawa, T. Takahashi, M. Konyo, and S. Tadokoro, “Radial-Layer Jamming Mechanism for String Configuration,” IEEE Robotics and Automation Letters, Vol.5, No.4, pp. 5221-5228, doi: 10.1109/LRA.2020.2983679, 2020.
- [22] H. Mochiyama, “The elastic rod approach toward system theory for soft robotics,” IFAC-PapersOnLine, Vol.53, No.2, pp. 9175-9180, doi: 10.1016/j.ifacol.2020.12.2169, 2020.
- [23] S. Antman, “Nonlinear problems of elasticity, 2nd Ed.,” Springer, doi: 10.1007/0-387-27649-1, 2004.
- [24] A. H. J. van der Leeuw, R. G. Bout, and G. A. Zweers, “Control of the cranio-cervical system during feeding in birds,” American Zoologist, Vol.41, pp. 1352-1363, doi: 10.1093/icb/41.6.1352, 2001.
- [25] J. Heidweiller, B. Lendering, and G. A. Zweers, “Development of motor patterns in cervical muscles of drinking chickens,” Netherlands J. of Zoology, Vol.42, pp. 1-22, doi: 10.1163/156854292X00017, 1992.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.