Letter:
Analysis of Soft Contact in Force Sensing and Elastic Jumping
Takahiro Matsuno and Shinichi Hirai
Department of Robotics, Ritsumeikan University
1-1-1 Noji-higashi, Kusatsu, Shiga 525-8577, Japan

This study focuses on the mechanical contact between a soft body and the environment, referred to as soft contact. First, the soft contact between an object and a soft capacitive sensor was analyzed. We derived the stress-strain relationship of the dielectric in a soft capacitive sensor, where the sensor output depended on the force; however, it was independent of the contact area. Second, the soft contact between an elastic jumping robot and the environment was analyzed. We derived the local optimal shapes for higher jumping.
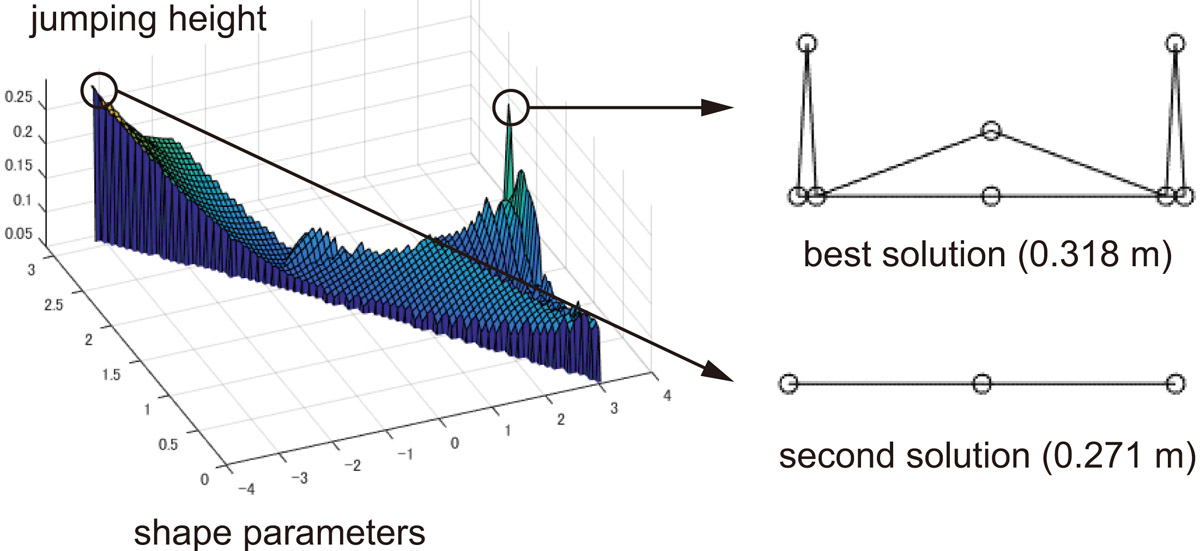
Optimized shapes of elastic jumping robot
- [1] T. Matsuno and S. Hirai, “Reducing the Influence of the Contact Area on a Soft Capacitive Force Sensor,” IEEE Robotics and Automation Letters, Vol.6, No.3, pp. 5824-5831, 2021.
- [2] T. Matsuno and S. Hirai, “Optimization of the Initial Deformed Shape of a Circular Elastic Jumping Robot,” Proc. of the 2020 3rd IEEE Int. Conf. on Soft Robotics (RoboSoft), pp. 58-63, 2020.
- [3] T. Matsuno, T. Katsuma, Z. Wang, and S. Hirai, “Novel Quick Return Mechanism and Dish Shape Deformable Body Structure for Circular Jumping Robot,” Proc. of the 2020 IEEE Int. Conf. on Real-Time Computing and Robotics (RCAR), pp. 210-215, 2020.
- [4] Z. Wang, H. Furuta, S. Hirai, and S. Kawamura, “A Scooping-Binding Robotic Gripper for Handling Various Food Products,” Frontiers in Robotics and AI, Vol.8, 64805, 2021.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.