Letter:
Development of High-Durability Flexible Fabrics Using High-Strength Synthetic Fibers and its Application to Soft Robots
Gen Endo*, Kaisei Yamagishi*, Yuta Yamanaka*, and Kenjiro Tadakuma**
*Department of Mechanical Engineering, School of Engineering, Tokyo Institute of Technology
2-12-1 Ookayama, Meguro-ku, Tokyo 152-8550, Japan
**Graduate School of Information Sciences, Tohoku University
6-6-01 Aramaki Aza Aoba, Aoba-ku, Sendai, Miyagi 980-8579, Japan

This letter introduces a research project as invited research of Science of Soft Robots from 2019–2020. The primary purpose of this research is to investigate the mechanical durability of fabrics subjected to repeated bending, as when used as a structural part of a soft robot. The fabric is then applied to a soft robot, a gripper for food handling. Two experimental durability testing devices are developed, and the results of initial measurements are presented. Additionally, a soft pneumatic hand with membranes, inspired by the form of a deep-sea octopus, is also presented as an application example.
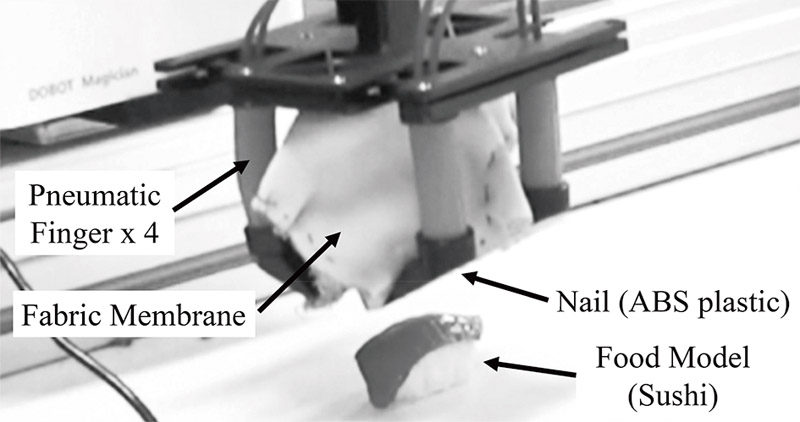
Soft pneumatic hand with a fabric membrane
- [1] S. Kitano, S. Hirose, A. Horigome, and G. Endo, “TITAN-XIII: sprawling-type quadruped robot with ability of fast and energy-efficient walking,” ROBOMECH J., Vol.3, Article No.8, doi: 10.1186/s40648-016-0047-1, 2016.
- [2] G. Endo, A. Horigome, and A. Takata, “Super Dragon: A 10-m-Long-Coupled Tendon-Driven Articulated Manipulator,” IEEE Robotics and Automation Letters, Vol.4, No.2, pp. 934-941, 2019.
- [3] K. Yamagishi, H. Nabae, K. Suzumori, K. Tadakuma, and G. Endo, “Evaluation of Flexural Dura bility of High Strength Textile for Robotic Applications,” Proc. of the 2021 JSME Conf. on Robotics and Mechatronics (ROBOMECH 2021), 2P1-K02, 2021 (in Japanese).
- [4] Y. Yamanaka, H. Nabae, K. Suzumori, and G. Endo, “Development of a Food Handling Soft Robot Hand with Membrane Considering a High-Speed Pick-and-Place Task,” Proc. of the 2020 JSME Conf. on Robotics and Mechatronics (ROBOMECH 2020), 1P1-L20, 2020 (in Japanese).
- [5] Y. Yamanaka, S. Katagiri, H. Nabae, K. Suzumori, and G. Endo, “Development of a Food Handling Soft Robot Hand Considering a High-Speed Pick-and-Place Task,” Proc. of the IEEE/SICE Int. Symp. Sys. Integ. (SII), pp. 87-92, 2020.
- [6] K. Suzumori, T. Maeda, H. Wantabe, and T. Hisada. “Fiberless flexible microactuator designed by finite-element method,” IEEE/ASME Trans. Mecha., Vol.2, No.4, pp. 281-286, 1997.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.