Paper:
Intelligent Path Planning Approach for Autonomous Mobile Robot
Ibrahim M. Al-Adwan
Al-Balqa Applied University (BAU)
P.O. Box: 15008, Amman 11134, Jordan

This paper presents a new path planning algorithm for an autonomous mobile robot. It is desired that the robot reaches its goal in a known or partially known environment (e.g., a warehouse or an urban environment) and avoids collisions with walls and other obstacles. To this end, a new, efficient, simple, and flexible path finder strategy for the robot is proposed in this paper. With the proposed strategy, the optimal path from the robot’s current position to the goal position is guaranteed. The environment is represented as a grid-based map, which is then divided into a predefined number of subfields to reduce the number of required computations. This leads to a reduction in the load on the controller and allows a real-time response. To evaluate the flexibility and efficiency of the proposed strategy, several tests were simulated with environments of different sizes and obstacle distributions. The experimental results demonstrate the reliability and efficiency of the proposed algorithm.
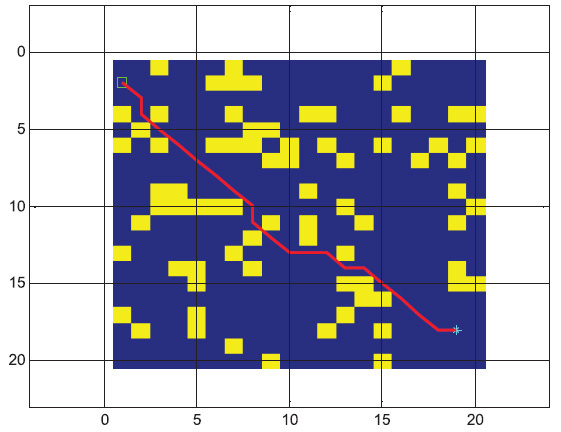
Path planning process in a scattered obstacles environment
- [1] J. F. Canny and M. C. Lin, “An opportunistic global path planner,” IEEE Conf. of Robotics and Automation, pp. 1554-1559, 1990.
- [2] H. Choset, K. M. Lynch, S. Hutchinson, G. Kantor, W. Burgard, L. Kavraki, and S. Thrun, “Principles of Robot Motion,” MIT Press, 2004.
- [3] J. H. Chuang and J. Ahuja, “An analytically tractable potential field model of free space and its application in obstacle avoidance,” IEEE Trans. Syst., Man, Cybern., Part B, Vol.28, No.5, pp. 729-736, 1998.
- [4] J. G. Juang, “Collision avoidance using potential fields,” Industrial Robot, Vol.25, No.6, pp. 408-415, 1998.
- [5] N. I. Katevas and S. G. Tzafestas, “The active kinematic histogram method for path planning of non-point, non-holonomically constrained mobile robots,” Advanced Robotics., Vol.12, Issue 4, pp. 373-395, 1997.
- [6] Y. Koren and J. Borenstein, “Potential field methods and their inherent limitations for mobile robot navigation,” Proc. of 1991 IEEE Conf. Robotics and Automation, Vol.2, pp. 1398-1404, 1991.
- [7] S. M. LaValle, “Planning Algorithms,” Cambridge University Press, 2006.
- [8] K. Manley, “Path Finding: From A* to LPA,” Ph.D. Thesis, University of Minnesota, 2003.
- [9] R. Takemura and G. Ishigami, “Traversability-Based RRT for Planetary Rover Path Planning in Rough Terrain with LIDAR Point Cloud Data,” J. Robot. Mechatron., Vol.29, No.5, pp. 838-846, 2017.
- [10] T. Sasaki, G. Enriquez, T. Miwa, and S. Hashimoto, “Adaptive Path Planning for Cleaning Robots Considering Dust Distribution,” J. Robot. Mechatron., Vol.30, No.1, pp. 5-14, 2018.
- [11] T. R. Schäfle, M. Mitschke, and N. Uchiyama, “Generation of Optimal Coverage Paths for Mobile Robots Using Hybrid Genetic Algorithm,” J. Robot. Mechatron., Vol.33, No.1, pp. 11-23, 2021.
- [12] B. Stout, “Smart Moves: Intelligent Path finding,” Game Developer Magazine, July 1997.
- [13] W. Warren, “Global path planning using artificial potential fields,” Proc. of 1989 IEEE Int. Conf. on Robotics and Automation (ICRA 1989) , Vol.1, pp. 316-321, 1989.
- [14] D. R. Wichmann and B. C. Wünsche, “Automated Route Finding on Digital Terrains,” Proc. of Image and Vision Computing New Zealand (IVCNZ 04), pp. 107-112, 2004.
- [15] K. H. Wu, C. H. Chen, J. M. Ko, and J. D. Lee, “Path planning and prototype design of an AGV,” Mathematical and Computer Modelling, Vol.30, Issues 7-8 pp. 147-167, 1999.
- [16] C. Wurll and D. Henrich, “Point-to-point and Multi-Goal Path Planning for Industrial Robots,” J. of Robotic Systems, Vol.18, Issue 8, pp. 445-461, 2001.
- [17] C. Wurl, D. Henrich, and H. Wörn, “Multi-goal Path Planning for Industrial Robots,” Int. Conf. on Robotics and Application (RA’99), 1999.
- [18] T. Yüksel and A. Sezgin, “An implementation of path planning algorithms for mobile robots on a grid based map,” Int. Conf. on Electrical and Electronics Engineering (ELECO’2005), pp. 382-387, 2005
- [19] A. V. Goldberg and C. Harrelson, “Computing the Shortest Path: A* Search Meets Graph Theory,” Microsoft Research, MSR-TR-2004-24, 2004.
- [20] T. Goto, T. Kosaka, and H. Noborio, “On the heuristics of A* or A Algorithm in ITS and Robot Path-Planning,” Proc. of 2003 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2003), Vol.2, pp. 1159-1166, 2003.
- [21] D. Holz, “Autonomous exploration and inspection,” Master Thesis, University of Applied Sciences Bonn-Rhein-Sieg, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.