Paper:
Development of Tele-Operated Underfloor Mobile Manipulator
Shunsuke Sato, Tianlin Song, and Yasumichi Aiyama
University of Tsukuba
1-1-1 Tennodai, Tsukuba, Ibaraki 305-8573, Japan

In this study, we propose a tele-operated mobile manipulator for conducting underfloor work, including both inspection and repair. We focus on a caulking operation, and develop a mobile manipulator for finding and repairing cracks in a foundation. When designing the mobile manipulator, we consider a typical narrow underfloor environment, and perform detailed calculations. As a user interface, we furnish an image-pointing system for enabling us to operate the manipulator simply by clicking on a hand camera image. Then, we evaluate its performance based on navigation experiments, trajectory tracking experiments, and overall evaluation experiments.
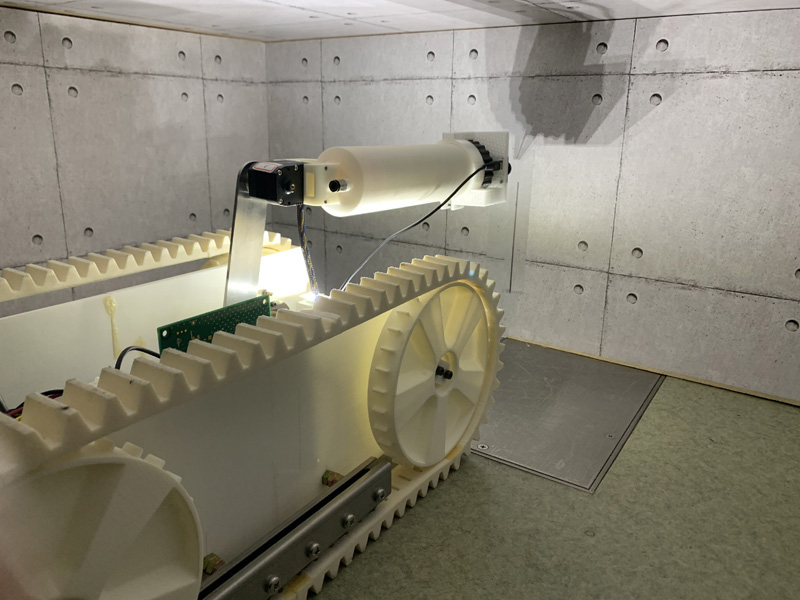
Underfloor mobile manipulator
- [1] A. Ohya, S. Yuta, T. Yoshida, E. Koyanagi, T. Imai, and S. Kitamura, “Development of Inspection Robot for Under Floor of House,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1429-1434, 2009.
- [2] N. M. H. Basri, K. S. M. Sahari, and A. Anuar, “Development of a Robotic Boiler Header Inspection Device with Redundant Localization System,” J. of Adv. Comput. Intell. Intell. Inform., Vol.18, No.3, pp. 451-458, 2014.
- [3] K. Hosotani and H. Yamamoto, “Free-Flow Tunnel Inspection Support Devices Aiming at Labor Saving of Visual Checking,” J. Robot. Mechatron., Vol.32, No.4, pp. 832-839, 2020.
- [4] A. Ariga, T. Yamaguchi, and S. Hashimoto, “Passively Adaptable Wall Climbing Robot in Narrow Space,” J. Robot. Mechatron., Vol.23, No.6, pp. 1055-1065, 2011.
- [5] A. Yamasaki, K. Nagatani, and K. Yoshida, “Autonomous Traversing Functions on Rough Terrain for Mobile Robots that Equips Additional Actuators in Locomotion,” Robotics Symposia, Vol.13, pp. 271-276, 2008 (in Japanese).
- [6] Y. Yashima, K. Gokurakuji, S. Kobayashi, D. Fujinaga, and T. Takamori, “Development of Search System on Rescue Robot UMRS2010,” Research Reports of Kobe City College of Technology, Vol.50, pp. 11-16, 2012 (in Japanese).
- [7] Y. Yashima, K. Gokurakuji, S. Kobayashi, D. Fujinaga, and T. Takamori, “Design of Running System and Performance Evaluation for Rescue Robot UMRS2010,” Research Reports of Kobe City College of Technology, Vol.50, pp. 17-22, 2012 (in Japanese).
- [8] K. Suzumori, M. Takata, and S. Wakimoto, “Development of Joints for Power Microrobot for Searching inside Debris,” J. Robot. Mechatron., Vol.15, No.5, pp. 555-560, 2003.
- [9] T. Aoki and S. Hirose, “Development of Slime Robot Using Bridle Bellows,” J. Robot. Mechatron., Vol.16, No.3, pp. 286-292, 2004.
- [10] H. Ohno and S. Hirose, “Pneumatically-Driven Active Cord Mechanism “Slim Slime Robot”,” J. Robot. Mechatron., Vol.26, No.1, pp. 105-106, 2014.
- [11] T. Doi, M. Okumura, T. Harada, and Y. Mitsuma, “Mechanism and Control of Connecting Robot Moving in Narrow and Irregular Terrain,” J. Robot. Mechatron., Vol.30, No.5, pp. 791-800, 2018.
- [12] K. Nagatani, S. Kiribayashi, Y. Okada, S. Tadokoro, T. Nishimura, T. Yoshida, E. Koyanagi, and Y. Hada, “Redesign of rescue mobile robot Quince,” Proc. of IEEE Int. Symp. on Safety, Secur., Rescue Robot. (SSRR), pp. 13-18, 2011.
- [13] T. Furuta, T. Yoshida, T. Nishimura, and H. Yamato, “Development of the Exploring Robot toward Future Indoor Surveillance Missions in the Fukushima Daiichi Nuclear Power Plant,” J. of the Robotics Society of Japan, Vol.32, No.2, pp. 92-97, 2014 (in Japanese).
- [14] T. Tsumaki, Y. Uchida, E. F. Fukushima, Y. Miura, and M. Tamada, “Development of the Unmanned Small Scout Robot,” Trans. of the Japan Society of Mechanical Engineers, C, Vol.78, No.793, pp. 164-175, 2012 (in Japanese).
- [15] A. Wolf, H. Brown, R. Casciola, A. Costa, M. Schwerin, E. Shamas, and H. Choset, “A mobile hyper redundant mechanism for search and rescue tasks,” Proc. of 2003 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2003), Vol.3, pp. 2889-2895, 2003.
- [16] T. Kamegawa, T. Akiyama, S. Sakai, K. Fujii, K. Une, E. Ou, Y. Matsumura, T. Kishutani, E. Nose, Y. Yoshizaki, and G. Akio, “Development of a separable search-and-rescue robot composed of a mobile robot and a snake robot,” Adv. Robotics, Vol.34, pp. 132-139, 2019.
- [17] H. Samani and R. Zhu, “Robotic Automated External Defibrillator Ambulance for Emergency Medical Service in Smart Cities,” IEEE Access, Vol.4, pp. 268-283, 2016.
- [18] A. Kebritchi, P. Hosseiniakram, S. Havashinezhadian, and M. Rostami, “Design and Development of an Omnidirectional Mobile Manipulator for Indoor Environment,” RSI Int. Conf. on Robotics and Mechatronics (IcRoM), pp. 152-158, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.