Paper:
LPWAN-Based Real-Time 2D SLAM and Object Localization for Teleoperation Robot Control
Alfin Junaedy, Hiroyuki Masuta, Kei Sawai, Tatsuo Motoyoshi, and Noboru Takagi
Department of Intelligent Robotics, Toyama Prefectural University
5180 Kurokawa, Imizu, Toyama 939-0398, Japan

In this study, the teleoperation robot control on a mobile robot with 2D SLAM and object localization using LPWAN is proposed. The mobile robot is a technology gaining popularity due to flexibility and robustness in a variety of terrains. In search and rescue activities, the mobile robots can be used to perform some missions, assist and preserve human life. However, teleoperation control becomes a challenging problem for this implementation. The robust wireless communication not only allows the operator to stay away from dangerous area, but also increases the mobility of the mobile robot itself. Most of teleoperation mobile robots use Wi-Fi having high-bandwidth, yet short communication range. LoRa as LPWAN, on the other hand, has much longer range but low-bandwidth communication speed. Therefore, the combination of them complements each other’s weaknesses. The use of a two-LoRa configuration also enhances the teleoperation capabilities. All information from the mobile robot can be sent to the PC controller in relatively fast enough for real-time SLAM implementation. Furthermore, the mobile robot is also capable of real-time object detection, localization, and transmitting images. Another problem of LoRa communication is a timeout. We apply timeout recovery algorithms to handle this issue, resulting in more stable data. All data have been confirmed by real-time trials and the proposed method can approach the Wi-Fi performance with a low waiting time or delay.
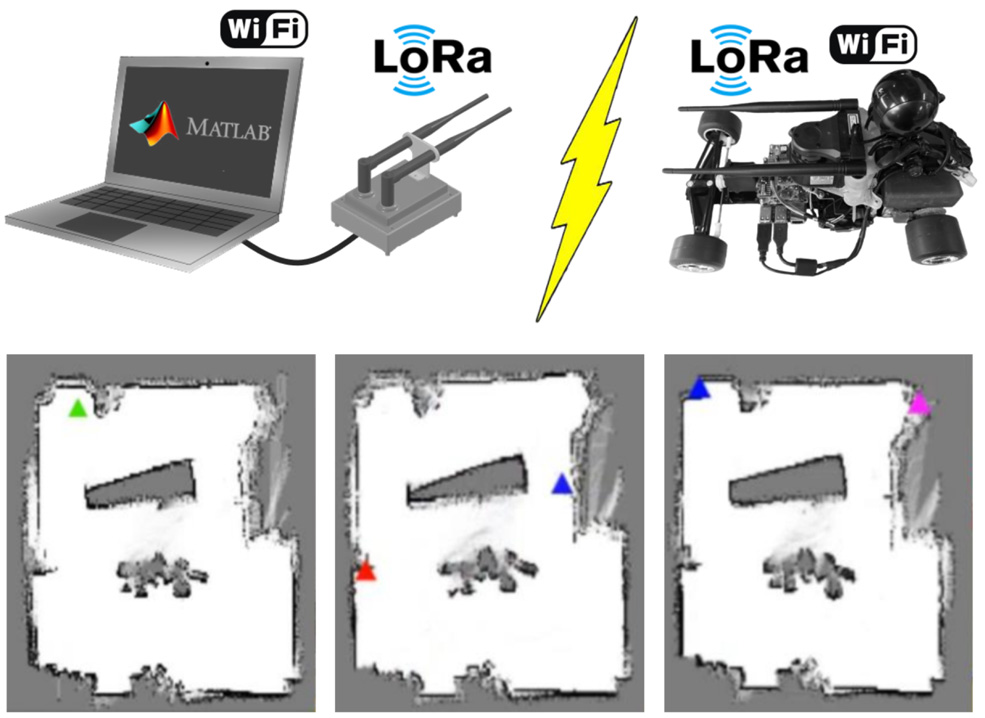
Teleoperation robot control with 2D SLAM
- [1] R. R. Murphy, “Disaster Robotics,” The MIT Press, 2014.
- [2] H. Balta et al., “Integrated Data Management for a Fleet of Search-and-rescue Robots,” J. Field Robot., Vol.33, pp. 539-582, 2017.
- [3] M. Schwarz et al., “NimbRo Rescue: Solving Disaster-Response Tasks with the Mobile Manipulation Robot Momaro,” J. Field Robot., Vol.34, pp. 400-425, 2017.
- [4] K. Ito and H. Maruyama, “Semi-Autonomous Serially Connected Multi-Crawler Robot for Search and Rescue,” Advanced Robot., Vol.30, pp. 489-503, 2016.
- [5] T. Takemori et al., “Development of The Multifunctional Rescue Robot FUHGA2 and Evaluation at The World Robot Summit 2018,” Advanced Robot., Vol.34, pp. 119-131, 2020.
- [6] H. Durrant-Whyte and T. Bailey, “Simultaneous Localization and Mapping: Part I,” IEEE Robot. and Automation Magazine, Vol.13, No.2, pp. 99-110, 2006.
- [7] T. Tsubouchi, “Introduction to Simultaneous Localization and Mapping,” J. Robot. Mechatron., Vol.31, No.3, pp. 367-374, 2019.
- [8] D. Geromichalos et al., “SLAM for Autonomous Planetary Rovers with Global Localization,” J. Field Robot., Vol.37, pp. 830-847, 2020.
- [9] N. Castaman et al., “RUR53: An Unmanned Ground Vehicle for Navigation, Recognition, and Manipulation,” Advanced Robot., Vol.35, pp. 1-18, 2021.
- [10] S. Hara et al., “Autonomous Mobile Robot for Outdoor Slope using 2D LiDAR with Uniaxial Gimbal Mechanism,” J. Robot. Mechatron., Vol.32, No.6, pp. 1173-1182, 2020.
- [11] J. Storms et al., “A Shared Control Method for Obstacle Avoidance with Mobile Robots and Its interaction with Communication Delay,” Int. J. of Robot. Research, Vol.36, pp. 820-839, 2017.
- [12] X. Zhang et al., “2D LiDAR-Based SLAM and Path Planning for Indoor Rescue using Mobile Robots,” J. Advanced Transportation, Vol.2020, 8867937, 2020.
- [13] Y. Li et al., “Development and Applications of Rescue Robots for Explosion Accidents in Coal Mines,” J. Field Robot., Vol.37, pp. 466-489, 2020.
- [14] A. Junaedy et al., “Real-Time Simultaneous Localization and Mapping for Low-Power Wide-Area Communication,” Proc. of IEEE Symp. Series on Computational Intell. (SSCI), pp. 1905-1912, 2020.
- [15] M. Mikawa, “Robust Wireless Communication for Small Exploration Rovers Equipped with Multiple Antennas by Estimating Attitudes of Rovers in Several Experimental Environments,” J. Robot. Mechatron., Vol.29, No.5, pp. 864-876, 2017.
- [16] T. Kagawa et al., “Multi-Hop Wireless Command and Telemetry Communication System for Remote Operation of Robots with Extending Operation Area Beyond Line-of-Sight using 920 MHz / 169 MHz,” Advanced Robot., Vol.34, pp. 756-766, 2020.
- [17] Q. Zhou et al., “Design and Implementation of Open LoRa for IoT,” IEEE Access, Vol.7, pp. 100649-100657, 2019.
- [18] A. Mahmood et al., “Scalability Analysis of a LoRa Network under Imperfect Orthogonality,” IEEE Trans. on Industrial Informatics, Vol.15, No.3, pp. 1425-1436, 2019.
- [19] Q. L. Hoang et al., “A Real-Time LoRa Protocol for Industrial Monitoring and Control Systems,” IEEE Access, Vol.8, pp. 44727-44738, 2020.
- [20] K. Kamarudin et al., “Integrating SLAM and Gas Distribution Mapping (SLAM-GDM) for Real-Time Gas Source Localization,” Advanced Robot., Vol.32, pp. 903-917, 2018.
- [21] Y. Tian et al., “Search and Rescue under The Forest Canopy using Multiple UAVs,” Int. J. of Robot. Research, Vol.39, pp. 1201-1221, 2020.
- [22] S. Karakaya et al., “A New Mobile Robot Toolbox for MATLAB,” J. Intell. Robot Syst., Vol.87, pp. 125-140, 2017.
- [23] G. Grisetti et al., “A Tutorial on Graph-Based SLAM,” IEEE Intell. Trans. Syst. Magazine, Vol.2, No.4, pp. 31-43, 2010.
- [24] M. Kaess et al., “Concurrent Filtering and Smoothing,” Proc. of the 15th Intl. Conf. on Information Fusion, pp. 1300-1307, 2012.
- [25] S. Karaman and E. Frazzoli, “Sampling-Based Algorithms for Optimal Motion Planning,” Int. J. of Robot. Research, Vol.30, pp. 846-894, 2011.
- [26] S. M. LaValle, “Rapidly-Exploring Random Trees: A New Tool for Path Planning,” Technical Report, Iowa State University, 1998.
- [27] N. Ouadah et al., “Car-Like Mobile Robot Oriented Positioning by Fuzzy Controllers,” Int. J. of Advanced Robot. Syst., Vol.5, No.3, pp. 249-256, 2008.
- [28] G. Premsankar et al., “Optimal Configuration of LoRa Networks in Smart Cities,” IEEE Trans. on Industrial Informatics, Vol.16, No.12, pp. 7243-7254, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.