Paper:
Design of Fin-Curvature-Based Feedback Controller for Efficient Swimming
Fumiaki Nose*, Yuichiro Sueoka*, Daisuke Nakanishi**, Yasuhiro Sugimoto*, and Koichi Osuka*
*Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan
**Department of Control Engineering, National Institute of Technology, Matsue College
14-4 Nishi-ikuma, Matsue, Shimane 690-8518, Japan

Over the past few decades, biologists and engineers have attempted to elucidate the swimming mechanism of fish and developed a fish-like robot to perform fast swimming in water. Such a robot will have wide applicability in investigations and exploration in the sea. There have been many studies on fish-type robots; however, the propulsion efficiency of the introduced robots is far from that of the actual fish. The main reason is that the robot controller for generating motions is conventionally designed by trial and error, and little attention has been placed on designing a motion controller that matches the body structure of a real fish. In this paper, we present an approach that uses fin-curvature-based feedback to design a motion controller. A swimming robot composed of a body with two actuated joints and a flexible tail fin is developed. After examining the relationship between the swimming speed and tail fin curvature in feedforward (open-loop) system experiments, we propose to reflect the tail fin curvature to the actuation inputs (phase difference between the two cyclic oscillations), which will perform the efficient swimming motion. Further, the results show that implementing the proposed feedback controller in a fish-type robot makes it swim similar to a real fish. In addition, the proposed controller functions to find inappropriate actuation according to the body structure.
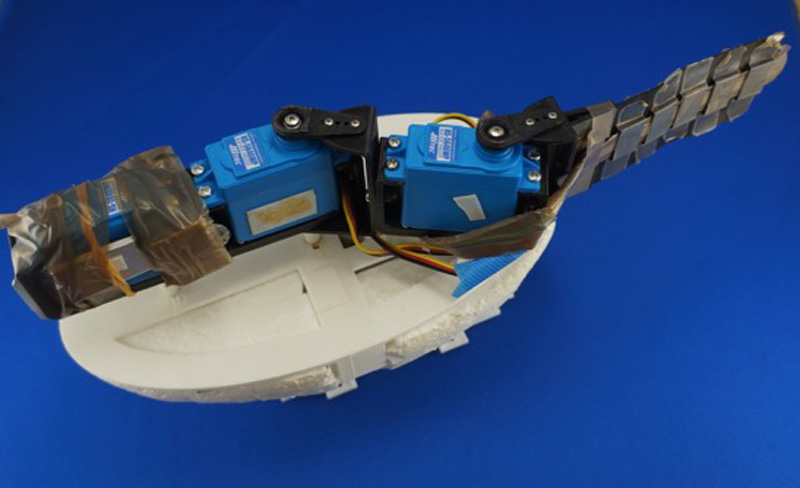
Developed robot with a flexible rubber fin
- [1] J. Gray, “Studies in animal locomotion,” J. Exp. Biol., Vol.16, pp. 9-17, 1936.
- [2] C. S. Wardle, “Limit of fish swimming speed,” Nature, Vol.255, No.5511, pp. 725-727, 1975.
- [3] R. Bainbridge, “The speed of swimming of fish as related to size and to the frequency and amplitude of the tail beat,” J. of Experimental Biology, Vol.35, No.1, pp. 109-133, 1958.
- [4] J. Hunter, “Sustained speed of jack mackerel, Trachurus symmetricus,” Collected Reprints, Vol.69, No.2, pp. 267-271, 1971.
- [5] P. W. Webb, “The swimming energetics of trout: I. Thrust and power output at cruising speeds,” J. of Experimental Biology, Vol.55, No.2, pp. 489-520, 1971.
- [6] D. Webber, R. Boutilier, S. Kerr, and M. Smale, “Caudal differential pressure as a predictor of swimming speed of cod (Gadus morhua),” J. of Experimental Biology, Vol.204, No.20, pp. 3561-3570, 2001.
- [7] J. D. Altringham and I. A. Johnston, “Modelling muscle power output in a swimming fish,” J. of Experimental Biology, Vol.148, No.1, pp. 395-402, 1990.
- [8] P. Valdivia y Alvarado and K. Youcef-Toumi, “Performance of machines with flexible bodies designed for biomimetic locomotion in liquid environments,” Proc. of the 2005 IEEE Int. Conf. on Robotics and Automation, pp. 3324-3329, 2005.
- [9] A. D. Marchese, C. D. Onal, and D. Rus, “Towards a self-contained soft robotic fish: on-board pressure generation and embedded electro-permanent magnet valves,” Experimental Robotics, Springer, pp. 41-54, 2013.
- [10] P. E. Sitorus, Y. Y. Nazaruddin, E. Leksono, and A. Budiyono, “Design and implementation of paired pectoral fins locomotion of labriform fish applied to a fish robot,” J. of Bionic Engineering, Vol.6, No.1, pp. 37-45, 2009.
- [11] A. Yamano, A. Shintani, T. Ito, and C. Nakagawa, “Evaluation of Driving Method of the Flexible Body Moving in Narrow Flow Passage,” J. Robot. Mechatron., Vol.26, No.3, pp. 349-356, 2014.
- [12] G. V. Lauder and J. L. Tangorra, “Fish locomotion: biology and robotics of body and fin-based movements,” R. Du et al. (Eds.), “Robot Fish,” Springer, pp. 25-49, 2015.
- [13] R. K. Katzschmann, J. DelPreto, R. MacCurdy, and D. Rus, “Exploration of underwater life with an acoustically controlled soft robotic fish,” Science Robotics, Vol.3, No.16, eaar3449, 2018.
- [14] R. J. Clapham and H. Hu, “iSplash-II: Realizing Fast Carangiform Swimming to Outperform a Real Fish,” Proc. of the 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2014), pp. 1080-1086, 2014.
- [15] A. Ming and W. Zhao, “Design of Biomimetic Soft Underwater Robots,” P. Hehenberger and D. Bradley (Eds.), “Mechatronic Futures,” Springer, pp. 91-111, 2016.
- [16] J. Ohlberger, G. Staaks, and F. Hölker, “Swimming efficiency and the influence of morphology on swimming costs in fishes,” J. of Comparative Physiology B, Vol.176, pp. 17-25, 2006.
- [17] V. van Ginneken, E. Antonissen, U. K. Müller, R. Booms, E. Eding, J. Verreth, and G. van den Thillart, “Eel migration to the Sargasso: remarkably high swimming efficiency and low energy costs,” J. of Experimental Biology, Vol.208, No.7, pp. 1329-1335, 2005.
- [18] R. Bainbridge, “The speed of swimming of fish as related to size and to the frequency and the amplitude of the tail beat,” J. Exp. Biol., Vol.35, pp. 109-133, 1958.
- [19] M. Nagai, I. Teruya, and T. Nakai, “Study on an Oscillating Wing Propulsion Ship,” Trans. of the Japan Society of Mechanical Engineers, Vol.62, No.593, pp. 200-206, 1996.
- [20] M. Yokota, K. Yamamoto, Y. Taira, T. Handa, and E. Morimoto, “Oxygen Consumption and Swimming Ability of Trachurus japonicus,” J. of National Fisheries University, Vol.56, No.4, pp. 267-271, 2008.
- [21] K. Onitsuka, J. Akiyama, A. Yamamoto, T. Watanabe, and T. Waki, “Study on Burst Speed of Several Fishes Living in Rivers,” J. of Japan Society of Civil Engineers, Vol.65, No.4, pp. 296-307, 2009.
- [22] N. Kato, “Control performance in the horizontal plane of a fish robot with mechanical pectoral fins,” IEEE J. of Oceanic Engineering, Vol.25, No.1, pp. 121-129, 2000.
- [23] E. Kim and Y. Youm, “Design and dynamic analysis of fish robot: Potuna,” Proc. of IEEE Int. Conf. on Robotics and Automation, Vol.5, pp. 4887-4892, 2004.
- [24] N. Kato and T. Inaba, “Guidance and control of fish robot with apparatus of pectoral fin motion,” Proc. of IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 446-451, 1998.
- [25] J. Herskin and J. Steffensen, “Energy savings in sea bass swimming in a school: measurements of tail beat frequency and oxygen consumption at different swimming speeds,” J. of Fish Biology, Vol.53, No.2, pp. 366-376, 1998.
- [26] D. Stevens, “The effect of temperature on tail beat frequency of fish swimming at constant velocity,” Canadian J. of Zoology, Vol.57, No.8, pp. 1628-1635, 2011.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.