Development Report:
Design of an Indoor Robotic Walking Care Device for Daily-Activity Activation of the Elderly
Seonghee Jeong*, Hiroki Aoyama*,**, Satoshi Takahara*, and Yoshiyuki Takaoka***
*Osaka Electro-Communication University
18-8 Hatsucho, Neyagawa, Osaka 572-8530, Japan
**Aino University
4-5-4 Higashioda, Ibaraki, Osaka 567-0012, Japan
***PTS Co., Ltd.
1-10-14 Itachibori, Nishi, Osaka, Osaka 550-0012, Japan

In this paper, an indoor robotic walking care device to assist the daily activity of the elderly is proposed. The proposed robotic walking care device was designed to provide support for daily activities, especially standing-sitting, walking, and toileting, based on the concept of the International Classification of Functioning and a modified V-shaped process while accounting for human-machine interactions. A prototype of the proposed device was designed and built on the basis of the concept, which implemented power assisting wheels and a lifting device. Risk assessments for different use cases and risk reduction measures against possible hazards were conducted using a three-step method to ensure safety while using the device. The validity of the proposed device was quantitatively verified through preliminary tests of standing-sitting, walking, and toileting motions in a care facility.
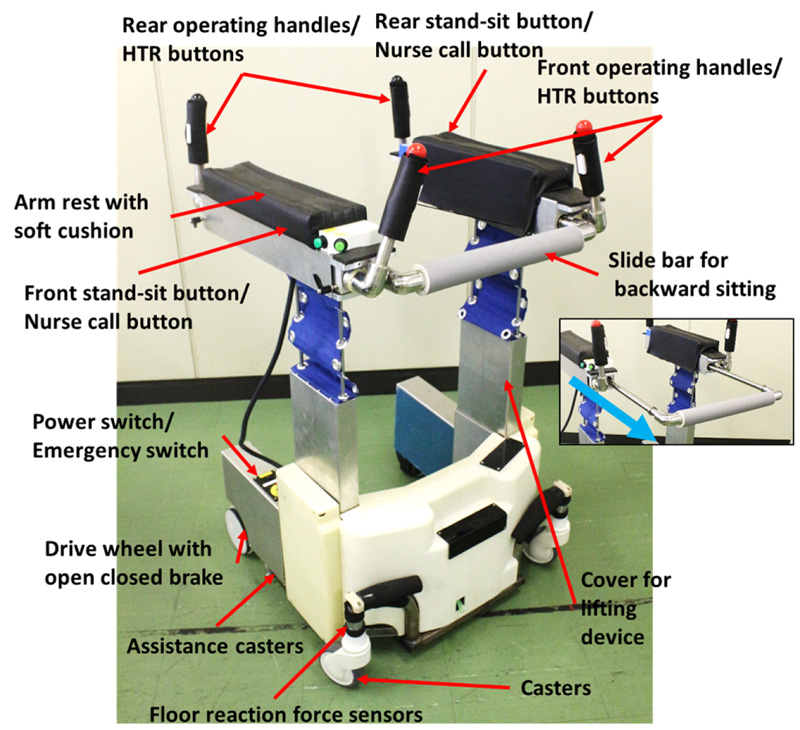
A robotic walking care device for the elderly
- [1] M. Bernhardt, M. Frey, G. Colombo, and R. Riener, “Hybrid Force-Position Control Yields Cooperative Behaviour of the Rehabilitation Robot LOKOMAT,” 9th Int. Conf. on Rehabilitation Robotics, pp. 536-539, 2005.
- [2] C. Bayón, O. Ramirez, J. I. Serrano et al., “Development and evaluation of a novel robotic platform for gait rehabilitation in patients with Cerebral Palsy: CPWalker,” Robotics and Autonomous Systems, Vol.91, pp. 101-114, 2017.
- [3] K. Miyawaki, T. Iwami, Y. Ogasawara, G. Obinata, and Y. Shimada, “Evaluation and Development of Assistive Cart for Matching to User Walking,” J. Robot. Mechatron., Vol.19, No.6, pp. 637-645, 2007.
- [4] Y. Tsusaka, F. Dallalibera, Y. Okazaki, M. Yamamoto, and Y. Yokokohji, “Development of a standing-up motion assist robot considering physiotherapist skills that bring out abilities from the patient,” Trans. of the JSME, Vol.83, No.852, 2017 (in Japanese).
- [5] C. T. Loh and H. Tsukagoshi, “Pneumatic Big-hand Gripper with Slip-in Tip Aimed for the Transfer Support of the Human Body,” 2014 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 475-481, 2014.
- [6] M. Yokota, S. Kawazoe, D. Chugo et al., “Standing Assistance Control considering with Posture Tolerance of its User,” Proc. of 2019 IEEE/SICE Int. Symp. on System Integration, pp. 543-547, 2019.
- [7] D. Chugo, S. Kawazoe, S. Yokota, H. Hashimoto, T. Katayama, Y. Mizuta, and A. Koujina, “A low cost robotic walker with standing assistance function,” Trans. on Control and Mechanical Systems, Vol.6, No.1, pp. 42-49, 2017.
- [8] T. Mukai, S. Hirano, H. Nakashima, Y. Kato, Y. Sakaida, S. Guo, and S. Hosoe, “Development of a Nursing-care Assistant Robot RIBA That Can Lift a Human in Its Arm,” Int. Conf. on Intelligent Robot and Systems, pp. 5996-6001, 2010.
- [9] O. Chuy, Y. Hirata, Z. Wang, and K. Kosuge, “Approach in Assisting a Sit-to-Stand Movement Using Robotic Walking Support System,” Proc. of 2006 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4343-4348, 2006.
- [10] R. Kamnik and T. Bajd, “Robot assisted standing-up,” Proc. of 2000 IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 2907-2912, 2000.
- [11] H. Hirukawa, “Robotic Devices for Nursing Care Project,” J. of the Robotics Society of Japan, Vol.34, No.4, pp. 228-231, 2016.
- [12] Y. Okawa, “The Development Concept Sheet based on the ICF, – The basic tool for the development of robotic care devices –,” LIFE, 2A1-06, 2015.
- [13] ISO 2003: ISO 12100:2003(E), “Safety of machinery – Basic concepts, general principles for design,” Int. Organization for Standardization, 2003.
- [14] J. E. Himann, D. A. Cunningham, P. A. Rechnitzer, and D. H. Paterson, “Age-related changes in speed of walking,” Medicine & Science in Sports & Exercise, Vol.20, No.2, pp. 161-166, 1988.
- [15] T. Nishijima, R. Koyama, I. Naito, S. Hatakeyama, H. Yamasaki, and T. Oku, “Relationship between Knee Extension Muscle Strength and Walking Ability in the Elderly Patients,” J. of Physical Therapy Science, Vol.19, No.2, pp. 95-99, 2004 (in Japanese).
- [16] H. Nakadate, S. Aomura, N. Ohbayashi, and O. Nitta, “Development of Simulation Model of Sit-to-Stand Movement for Design of a Power Assistance Type Handrail,” Trans. of the JSME Series C, Vol.78, No.794, pp. 3504-3514, 2012 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.