Paper:
Facilitative Exercise for Surface Myoelectric Activity Using Robot Arm Control System – Training Scheme with Gradually Increasing Difficulty Level –
Ryota Hayashi*, Naoki Shimoda**, Tetsuya Kinugasa*, and Koji Yoshida*
*Department of Mechanical Systems Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan
**Graduate School of Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan

Various control systems for robot arms using surface myoelectric signals have been developed. Abundant pattern-recognition techniques have been proposed to predict human motion intent based on these signals. However, it is laborious for users to train the voluntary control of myoelectric signals using those systems. In this research, we aim to develop a rehabilitation support system for hemiplegic upper limbs with a robot arm controlled by surface myoelectric signals. In this study, we construct a simple one-link robot arm that is controlled by estimating the wrist motion from the surface myoelectric signals on the forearm. We propose a training scheme with gradually increasing difficulty level for robot arm manipulation to evoke surface myoelectric signals. Subsequently, we investigate the possibility of facilitative exercise for the voluntary surface myoelectric activity of the desired muscles through trial experiments.
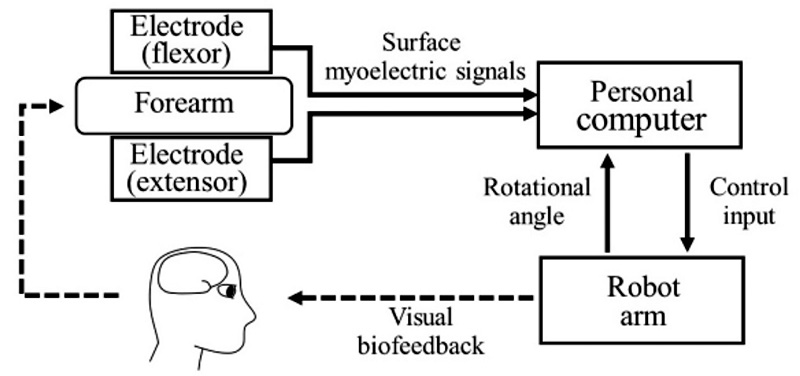
Configuration of training system
- [1] H. Sakakima, K. Ijiri, F. Matsuda, H. Tominaga, T. Biwa, K. Yone, and Y. Sankai, “A newly developed robot suit hybrid assistive limb facilitated walking rehabilitation after spinal surgery for thoracic ossification of the posterior longitudinal ligament,” Hindwai Publishing Corp., Case Reports in Orthopedics, 621405, 2013.
- [2] M. R. Dawson, F. Fahimi, and J. P. Carey, “The development of a myoelectric training tool for above-elbow amputees,” The Open Biomedical Engineering J., Vol.6, pp. 5-15, 2012.
- [3] T. Tsuji, T. Shibanoki, G. Nakamura, and A. Furui, “Development of Myoelectric Robotic/Prosthetic Hands with Cybernetic Control at the Biological Systems Engineering Laboratory, Hiroshima University,” J. Robot. Mechatron., Vol.31, No.1, pp. 27-34, 2019.
- [4] M. Ison, I. Vujaklija, B. Whitsell, D. Farina, and P. Artemiadis, “Simultaneous myoelectric control of a robot arm using muscle synergy-inspired inputs from high-density electrode grids,” IEEE Int. Conf. on Robotics and Automation, doi: 10.1109/ICRA.2015.7140108, 2015.
- [5] K. Kawahira, M. Shimodozono, S. Etoh, K. Kamada, T. Noma, and N. Tanaka, “Effects of intensive repetition of a new facilitation technique on motor functional recovery of the hemiplegic upper limb and hand,” Brain Injury, Vol.24, No.10, pp. 1202-1213, 2010.
- [6] R. Song, K. Tong, X. Hu, and W. Zhou, “Myoelectrically controlled wrist robot for stroke rehabilitation,” J. of NeuroEngineering and Rehabilitation, Vol.10, No.52, pp. 1-8, 2013.
- [7] H. Inoue and T. Noritsugu, “Development of Upper-Limb Power-Assist Machine Using Linkage Mechanism – Mechanism and its Fundamental Motion –,” Int. J. Automation Technol., Vol.8, No.2, pp. 193-200, 2014.
- [8] K. Matsushita, A. Yamakawa, H. Yokoi, and T. Arai, “A Case Study Approach: Walking Assist Scheme Exploiting Somatic Reflex of a Leg-Paralysis Patient,” J. Robot. Mechatron., Vol.19, No.6, pp. 629-636, 2007.
- [9] R. Hayashi, T. Sawada, T. Kinugasa, and K. Yoshida, “On facilitating method for skill acquisition of robot manipulation using surface myoelectric signals,” J. of Physics, Conf. Series, No.1065, doi: 10.1088/1742-6596/1065/17/172004, 2018.
- [10] T. Sawada, R. Hayashi, K. Sakai, K. Yamakawa, T. Kinugasa, and K. Yoshida, “Experimental System for Supporting Acquisition of Maneuvering Skill of a Robot Arm Manipulation with Surface Myoelectric Potential,” Proc. of the 12th SICE System Integration Division Annual Conf., pp. 98-102, 2011 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.