Paper:
Ankle Joint Stretching Device Using Tension Rod for Self Rehabilitation
Hideki Toda and Shin Sugihara
Department of Electric and Electronic Systems Engineering, Faculty of Engineering, University of Toyama
3190 Gofuku, Toyama, Toyama 930-8555, Japan

This paper proposed an ankle joint stretching device that is intended for self-rehabilitation by using a tension rod structure. Physical therapists treat their patients to prevent a subject ankle joint’s contracture and improve walking function. Still a sufficient rehabilitation therapy cannot be done due to demand for a labor-task of the ankle joint rehabilitation. There is a demand for the self-rehabilitation system long time to reduce the labor task, and especially it can be installed easily in a chair or bed in a patient home. By using a pantograph jack and spring casters, the developed device does not depend on installation location. It does not need a transfer assist process to the rehabilitation machine, which causes back pain of caregivers, and it allows for a self-rehabilitation of an ankle joint stretching. The experiment confirmed that the positional relationship was stabilized between the rotation axis of the device and the ankle joint position within (σx,σy)=(2.4, 2.5) mm during ankle dorsiflexion stretching in a fixed state of the device, which was realized by the pantograph jack and spring casters. Our proposed system that does not need transfer assistance before/after treatment will lead to self-rehabilitation for the ankle joint.
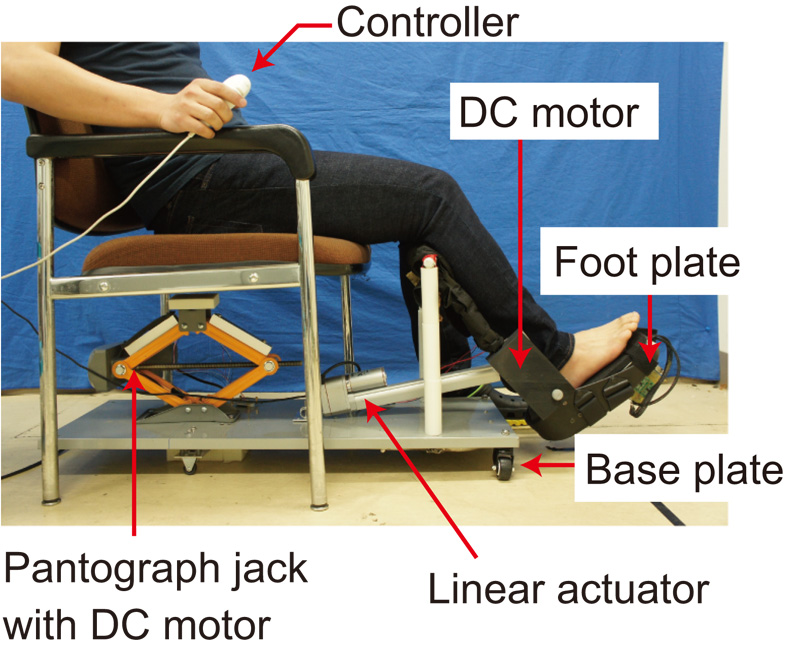
Developed ankle joint stretching device
- [1] K. Fukui and S. Maeda, “Rehabilitation of old man,” Igaku-Shoin Ltd., 2010 (in Japanese).
- [2] P. J. Mansfield and D. A. Neumann, “Essentials of Kinesiology for the Physical Therapist Assistant 2nd Edition,” Mosby Elsevier, 2013.
- [3] A. Mero, P. V. Komi, and R. J. Gregor, “Biomechanics of sprint running: A Review,” Sports Medicine, Vol.13, No.6, pp. 376-392, 1992.
- [4] K. Hamada and M. Sasaki, “Effects of Static Stretching on Jumping Ability: from Physiological and Functional Aspects,” Japanese J. of Physical Therapy Science, Vol.23, No.3, pp. 463-467, 2008 (in Japanese).
- [5] A. Kato and S. Hirano, “Development of rehabilitation equipment of the foot joint, which aims to walking recovery,” Joint Symp. Proc., pp. 220-223, 2003 (in Japanese).
- [6] K. E. Hagbarth, J. V. Hägglund, M. Nordin, and E. U. Wallin, “Thixotropic Behaviour of human finger flexor muscle with accompanying changes in spindle and reflex responses to stretch,” The J. of Physiology, Vol.368, No.1, pp. 323-342, 1985.
- [7] H. Watanabe, J. Matsuoka, S. Nashimoto, Y. Koga, G. Oomori, K. Endo, M. Tanaka, A. Nawata, and R. Sasaki, “Study of the quadriceps muscle tension level change caused by lower limb muscle strength-training equipment for the valid duration of static stretching,” Niigata Koseiren Medical J., Vol.22, No.1, pp. 34-38, 2013 (in Japanese).
- [8] D. Matsuura, T. Koga, and G. Takeda, “Development mechanism of ankle rehabilitation device having a joint load reduction function,” 30th Anniversary Annual Conf. of the Robotics Society of Japan Meeting, 2012 (in Japanese).
- [9] K. Nagasawa and S. Shiraishi, “Muscle oxygen saturation of the expansion site and the effect on the muscle blood flow from the difference of extension time of static stretching,” Physical Education Research, Vol.56, No.2, pp. 423-433, 2011 (in Japanese).
- [10] T. Suzuki, Y. Yamamiya, T. Akimoto, and A. Matsumoto, “Rehabilitation support for knee and ankle joint motion using pneumatic actuators,” Proc. of the Conf. on Information, Intelligence and Precision Equipment: IIP, pp. 355-358, 2005 (in Japanese).
- [11] Y. Tsukamoto, K. Wada, F. Fujii, and T. Tamura, “Performance of the ankle joint stretching apparatus,” The JSME Symp. on Welfare Engineering, pp. 141-144, 2008 (in Japanese).
- [12] R. Tanizaki, H. Toda, and G. Capi, “Development of ankle contracture removal equipment that reproduces the continuous passive motion method physiotherapists,” 30th Anniversary Annual Conf. of the Robotics Society of Japan Meeting, 2012 (in Japanese).
- [13] H. Toda, R. Tanizaki, and T. Imaeda, “Ankle contracture removal system,” Japanese Patent JP2014-14493, 2014.
- [14] S. Kakurai, “Rehabilitation system,” The Japanese J. of Rehabilitation Medicine, Vol.31, No.3, pp. 205-212, 1994.
- [15] S. Nagase, N. Saga, and S. Suga, “Development of ankle prevention instrument using pneumatic artificial muscles,” Life support medical welfare Engineering Society Joint Conf., 2D1-4, pp. 289-291, 2010 (in Japanese).
- [16] Y. Noda, S. Sasaki, S. Iwasa, T. Ooura, H. Tate, and M. Takahashi, “Development of a simple device for the ankle dorsiflexion limitation of movement prevention,” Proc. of Hokkaido Social Insurance Hospital, Vol.6, pp. 15-18, 2006 (in Japanese).
- [17] M. Hirasawa, H. Okada, and M. Shimojo, “The Development of the Plantar Pressure Sensor Shoes for Gait Analysis,” J. Robot. Mechatron., Vol.20, No.2, pp. 289-295, 2008.
- [18] N. Saga, N. Saito, and J. Nagase, “Ankle Rehabilitation Device to Prevent Contracture Using a Pneumatic Balloon Actuator,” Int. J. Automation Technol., Vol.5, No.4, pp. 538-543, 2011.
- [19] T. Onodera, E. Suzuki, M. Ding, H. Takemura, and H. Mizoguchi, “Force, Stiffness and Viscous Damping Control of a Stewart-Platform-Type Ankle-Foot Rehabilitation Assist Device with Pneumatic Actuator,” J. Robot. Mechatron., Vol.25, No.6, pp. 897-905, 2013.
- [20] K. Nomura, T. Yonezawa, H. Takemura, and H. Mizoguchi, “Development of Six-DOF Human Ankle Motion Control Device Using Stewart Platform Structure for Fall Prevention,” J. Robot. Mechatron., Vol.28, No.5, pp. 654-663, 2016.
- [21] Y. Hayashibara, H. Hakogi, and K. Watanabe, “Development of a CPM Device for Rehabilitation with Variable Stiffness Mechanism,” The Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec), p. 75, 2003 (in Japanese).
- [22] S. Yasuno, T. Kamamo, S. Suzuki, and H. Harada, “Fundamental study and trial of the ankle joint power assist system,” IEICE Technical Report, MBE, Bio Cybernetics and ME, Vol.103, No.184, 35-3, 2003 (in Japanese).
- [23] E. Tanaka, T. Ikehara, H. Yusa, Y. Sato, T. Sakurai, S. Saegusa, K. Ito, and L. Yuge, “Walking-Assistance Apparatus as a Next-Generation Vehicle and Movable Neuro-Rehabilitation Training Appliance,” J. Robot. Mechatron., Vol.24, No.5, pp. 851-865, 2012.
- [24] D. Matsuura, T. Koga, S. Ishida, and Y. Takeda, “Kinetostatic Design of Ankle Rehabilitation Mechanism Capable of Adapting to Changes in Joint Axis,” J. Robot. Mechatron., Vol.25, No.6, pp. 1029-1037, 2013.
- [25] H. Toda, T. Matsumoto, R. Tanizaki, and T. Imaeda, “Ankle joint pushing mechanism by stabilization of ankle position using a brace structure,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.10, No.1, p. JAMDSM0013, 2016.
- [26] H. Toda, T. Matsumoto, and H. Takeuchi, “Experimental Study of Ankle Joint Pushing Mechanism Concerning About the Horizontal Movement of Talus,” J. Robot. Mechatron., Vol.29, No.2, pp. 299-305, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.