Development Report:
Propagation Measurements of Multi-Hop Command and Telemetry Communications System in the 169 MHz Band for Drones
Ryu Miura*, Toshinori Kagawa**, Fumie Ono*,***, Lin Shan*, Takashi Matsuda*, and Fumihide Kojima*
*National Institute of Information and Communications Technology (NICT)
3-4 Hikarino-oka, Yokosuka, Kanagawa 239-0847, Japan
** Central Research Institute of Electric Power Industry (CRIEPI)
2-6-1 Nagasaka, Yokosuka, Kanagawa 240-0196, Japan
*** Ministry of Internal Affairs and Communications
2-1-2 Kasumigaseki, Chiyoda-ku, Tokyo 100-8926, Japan

The 169 MHz band was assigned for unmanned vehicles such as robots and drones by the Ministry of Internal Affairs and Communications (MIC) in 2016 in Japan, according to the reallocation of the TV band from VHF (analog) to UHF (digital). This band is expected to have a long range and good diffraction characteristics during drone operation over a long range with obstacles such as buildings, trees, or terrains. In this paper, we present the prototype system and its propagation experiments of command and telemetry communications at 169 MHz, which is added to a multi-hop communication unit in the 920 MHz band developed previously to enhance the beyond line-of-sight (BLOS) operation performance for drones.
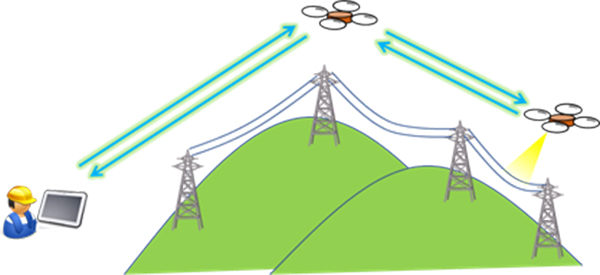
Multi-hop control link in the 169 MHz band
- [1] K. Nonami, “Research and Development of Drone and Roadmap to Evolution,” J. Robot. Mechatron., Vol.30, No.3, pp. 322-336, 2018.
- [2] A. Lavric and V. Popa, “Internet of Things and LoRa™ Low-Power Wide-Area Networks: A survey,” 2017 Int. Symp. on Signals, Circuits and Systems (ISSCS), pp. 1-5, 2017.
- [3] M. Mozaffari, A. Taleb Zadeh Kasgari, W. Saad, M. Bennis, and M. Debbah, “Beyond 5G With UAVs: Foundations of a 3D Wireless Cellular Network,” IEEE Trans. on Wireless Communications, Vol.18, No.1, pp. 357-372, 2019.
- [4] T. Kagawa, F. Ono, L. Shan, R. Miura, K. Nakadai, K. Hoshiba, M. Kumon, H. G. Okuno, S. Kato, and F. Kojima, “Mulit-hop wireless command ante telemetry communication system for remote operation of robots with extending operation area beyond line-of-sight using 920 MHz/169 MHz,” Advanced Robotics, Vol.34, No.11, pp. 756-766, 2020.
- [5] J. H. Jung, S. Park, and S. L. Kim, “Multi-robot path finding with wireless multi-hop communications,” IEEE Commun. Mag., Vol.48, No.7, pp. 126-132, 2010.
- [6] K. Takizawa, M. Suzuki, and R. Miura, “Telemetry system deployable into nuclear power plants by using 429-MHz radio communications,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2013), 2013.
- [7] P. Necsulescu and K. Schilling, “Automation of a multiple robot self-organizing multi-hop mobile ad-hoc network (MANET) using signal strength,” Proc. of 2015 IEEE Int. Instrumentation and Measurement Technology Conf. (I2MTC), pp. 505-510, 2015.
- [8] O. Esrafilian, R. Gangula, and D. Gesbert, “Autonomous UAV-aided mesh wireless networks,” IEEE INFOCOM 2020 – IEEE Conf. on Computer Communications Workshops (INFOCOM WKSHPS), pp. 634-640, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.