Paper:
Aerial Manipulator Control Method Based on Generalized Jacobian
Takahiro Ikeda*, Kenichi Ohara**, Akihiko Ichikawa**, Satoshi Ashizawa**, Takeo Oomichi**, and Toshio Fukuda**
*Gifu University
1-1 Yanagido, Gifu city, Gifu 501-1193, Japan
**Meijo University
501-1 Shiogamaguchi, Tempaku-ku, Nagoya, Aichi 468-8502, Japan

This paper describes a control method for an aerial manipulator on an unmanned aerial vehicle (UAV) by using a generalized Jacobian (GJ). Our task is to realize visual check of bridge inspection by employing a UAV with a multi-degree-of-freedom (DoF) manipulator on its top. The manipulator is controlled by using the GJ. Subsequently, by comparing the aerial manipulator control with a conventional Jacobian experimentally, we discovered that the accuracy of the control improved by applying the GJ. The manipulator has three DoFs in the X-Z plane of the UAV coordinate system. The experiment shows that the manipulator controlled with the GJ can compensate for the pose error of the body by 54.5% and 47.7% in the X- and Z-axes, respectively.
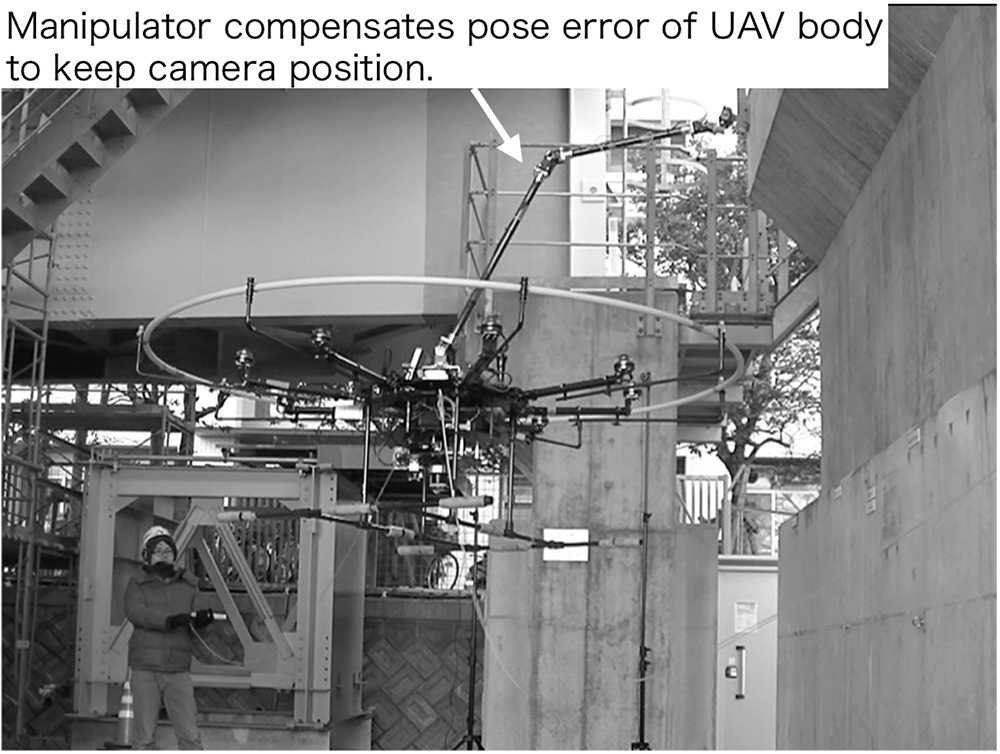
Aerial manipulator for visual verification
- [1] T. Ikeda, S. Yasui, M. Fujihara, K. Ohara, S. Ashizawa, A. Ichikawa, A. Okino, T. Oomichi, and T. Fukuda, “Wall contact by octo-rotor uav with one dof manipulator for bridge inspection,” Proc. of 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 5122-5127, 2017.
- [2] T. Ikeda, S. Yasui, K. Ohara, S. Ashizawa, A. Ichikawa, A. Okino, T. Oomichi, and T. Fukuda, “Pilot test on hammering quality control of bridge inspection by multi-rotor uav with one dof manipulator,” Proc. of 28th 2017 Int. Symp. on Micro-NanoMechatronics and Human Science, pp. 151-152, 2017.
- [3] T. Ikeda, S. Yasui, S. Minamiyama, K. Ohara, S. Ashizawa, A. Ichikawa, A. Okino, T. Oomichi, and T. Fukuda, “Stable impact and contact force control by uav for inspection of floor slab of bridge,” Advanced Robotics, Vol.32, No.19, pp. 1061-1076, 2018.
- [4] T. Ikeda, S. Yasui, K. Ohara, A. Ichikawa, S. Ashizawa, A. Okino, T. Oomichi, and T. Fukuda, “Improvement of contact condition between bridge inspecting aerial manipulator by applying compliance mechanism,” Proc. of 2018 Int. Symp. on Micro-NanoMechatronics and Human Science (MHS2018), MP2-2-5, 2018.
- [5] T. Ikeda, S. Minamiyama, S. Yasui, K. Ohara, S. Ashizawa, A. Ichikawa, A. Okino, T. Oomichi, and T. Fukuda, “Stable camera position control of unmanned aerial vehicle with three-degree-of-freedom manipulator for visual test of bridge inspection,” J. of Field Robotics, pp. 1-10, doi: 10.1002/rob.21899, 2019.
- [6] T. Fukuda, F. Arai, H. Matsuura, K. Nishibori, H. Sakauchi, and N. Yoshii, “A study on wall surface mobile robots: Development of moving mechanism for crawler-type wall surface mobile robots with vacuum pads,” JSME Int. J., Series C, Vol.38, No.2, pp. 292-299, 1995.
- [7] B. L. Luk, D. S. Cooke, S. Galt, A. A. Collie, and S. Chen, “Intelligent legged climbing service robot for remote maintenance applications in hazardous environments,” Robotics and Autonomous Systems, Vol.53, pp. 142-152, 2005.
- [8] M. P. Murphy and M. Sitti, “Waalbot: An agile small-scale wall-climbing robot utilizing dry elastomer adhesives,” IEEE/ASME Trans. on Mechatoronics, Vol.12, No.3, pp. 330-338, 2007.
- [9] K. Nonami, “Drone technology, cutting-edge drone business, and future prospects,” J. Robot. Mechatron., Vol.28, No.3, pp. 262-272, 2016.
- [10] K. Hidaka, D. Fujimoto, and K. Sato, “Autonomous adaptive flight control of a uav for practical bridge inspection using multiple-camera image coupling method,” J. Robot. Mechatron., Vol.31, No.6, pp. 845-854, 2019.
- [11] N. Metni and T. Hamel, “A uav for bridge inspection: Visual servoing control law with orientation limits,” Automation in Construction, Vol.17, pp. 3-10, 2007.
- [12] S. Omari, P. Gohl, M. Burri, M. Achtelik, and R. Siegwart, “Visual industrial inspection using aerial robots,” Proc. of the 2014 3rd Int. Conf. on Applied Robotics for the Power Industry, pp. 1-5, 2014.
- [13] G. Morgenthal and N. Hallermann, “Quality assessment of unmanned aerial vehicle (uav) based visual inspection of structures,” Advances in Structural Engineering, Vol.17, No.3, pp. 289-302, 2014.
- [14] F. Bonnin-Pascual, A. Ortiz, E. Garcia-Fidalgo, and J. P. Company, “A micro-aerial platform for vessel visual inspection based on supervised autonomy,” Proc. of 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 46-52, 2015.
- [15] J. Nikolic, M. Burri, J. Rehder, S. Leutenegger, C. Huerzeler, and R. Siegwart, “A uav system for inspection of industrial facilities,” Proc. of 2013 IEEE Aerospace Conf., pp. 1-8, 2013.
- [16] N. Piasco, J. Marzat, and M. Sanfourche, “Collaborative localization and formation flying using distributed stereo-vision,” Proc. of 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1202-1207, 2016.
- [17] D. Meier, R. Brockers, L. Matthies, R. Siegwart, and S. Weiss, “Detection and characterization of moving objects with aerial vehicles using inertial-optical flow,” Proc. of 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2473-2480, 2015.
- [18] D. Abeywardena, S. Huang, B. Barnes, G. Dissanayake, and S. Kodagoda, “Fast, on-board, model-aided visual-inertial odometry system for quadrotor micro aerial vehicles,” Proc. of 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1530-1537, 2016.
- [19] C. Powers, D. Mellinger, A. Kushleyev, B. Kothmann, and V. Kumar, “Influence of aerodynamics and proximity effects in quadrotor flight, experimental robotics,” Springer Tracts in Advanced Robotics, Vol.88, pp. 289-302, 2013.
- [20] P. J. Sanchez-Cuevas, G. Heredia, and A. Ollero, “Multirotor uas for bridge inspection by contact using the ceiling effect,” Proc. of 2017 Int. Conf. on Unmanned Aircraft Systems (ICUAS), pp. 767-774, 2017.
- [21] F. Huber, K. Kondak, K. Krieger, D. Sommer, M. Schwarzbach, M. Laiacker, I. Kossyk, S. Parusel, S. Haddadin, and A. Albu-Schäffer, “First analysis and experiments in aerial manipulation using fully actuated redundant robot arm,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3452-3457, 2013.
- [22] F. Ruggiero, M. A. Trujillo, R. Cano, H. Ascorbe, A. Viguria, C. Peréz, V. Lippiello, A. Ollero, and B. Siciliano, “A multilayer control for multirotor uavs equipped with a servo robot arm,” Proc. of 2015 IEEE Int. Conf. on Robotics and Automation, pp. 4014-4020, 2015.
- [23] C. Wu, J. Qi, D. Song, X. Qi, T. Lin, and J. Han, “Development of an unmanned helicopter automatic barrels transportation system,” Proc. of 2015 IEEE Int. Conf. on Robotics and Automation, pp. 4686-4691, 2015.
- [24] H. Yang and D. Lee, “Hierarchical cooperative control framework of multiple quadrotor-manipulator systems,” Proc. of 2015 IEEE Int. Conf. on Robotics and Automation, pp. 4656-4662, 2015.
- [25] G. Garimella and M. Kobilarov, “Towards model-predictive control for aerial pick-and-place,” Proc. of 2015 IEEE Int. Conf. on Robotics and Automation, pp. 4692-4697, 2015.
- [26] M. Sharifi and H. Sayyaadi, “Nonlinear robust adaptive cartesian impedance control of uavs equipped with a robot manipulator,” Advanced Robotics, Vol.29, No.3, pp. 171-186, 2015.
- [27] A. E. Jimenez-Cano, J. Braga, G. Heredia, and A. Ollero, “Aerial manipulator for structure inspection by contact from the underside,” Proc. of 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1879-1884, 2015.
- [28] V. Nayak, C. Papachristos, and K. Alexis, “Design and control of an aerial manipulator for contact-based inspection,” CoRR, abs/1804.03756, 2018.
- [29] Y. Umetani and K. Yoshida, “Resolved motion rate control of space manipulators with generalizes Jacobian matrix,” IEEE Trans. on Robotics and Automation, Vol.5, No.3, pp. 303-314, 1989.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.