Development Report:
Proposal of Robot Software Platform with High Sustainability
Masahito Fukuda, Tomokazu Takahashi, Masato Suzuki, Yasushi Mae, Yasuhiko Arai, and Seiji Aoyagi
Department of Mechanical Engineering, Faculty of Engineering Science, Kansai University
3-3-35 Yamate-cho, Suita, Osaka 564-8680, Japan

At present, various robotics competitions are being held, including the Tsukuba Challenge. The purpose of participating in a robotics competition is to confirm what can be done with the current technology and to demonstrate new research results. Participating teams often use open source software (OSS) for path planning and autonomous navigation. OSS is advantageous in facilitating participation in robotics competitions. However, applying it to a new robot is difficult when a new research does not involve OSS. In addition, robot systems do not consist only of OSS, and the burden of developing and maintaining other systems is significant. To solve the above problems, a software platform that allows for the addition of research achievements of individual robots is desired. With such a platform, research elements that have already been developed can be shared without the need to develop a new system. This makes it easier to maintain and manage the system and increase its sustainability.
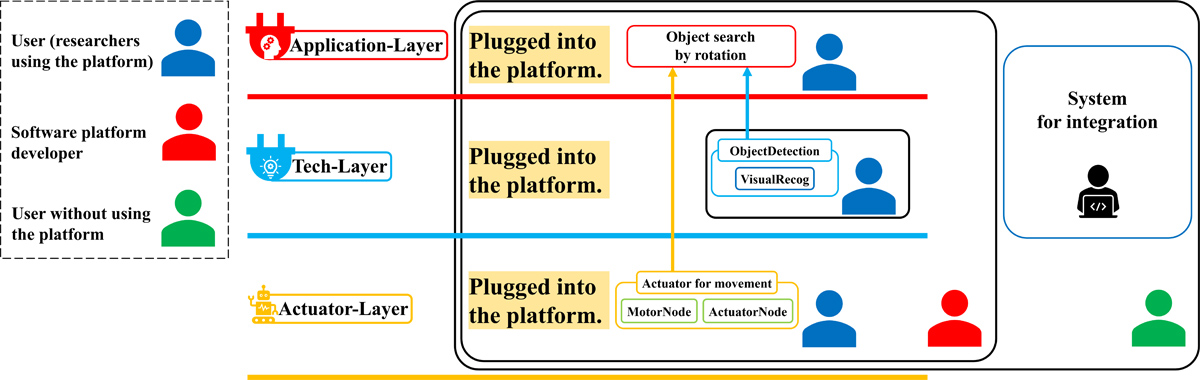
Range of software implementation
- [1] T. Shibata and K. Wada, “Introduction of field test on robot therapy by seal robot, PARO,” J. of the Robotics Society of Japan, Vol.29, No.3, pp. 246-249, 2011.
- [2] T. Kodachi et al., “Development of risk reducing algorithm for personal mobility robots and its practicality evaluation at Tsukuba special district for mobility robots,” J. of the Robotics Society of Japan, Vol.32, No.7, pp. 651-662, 2014.
- [3] D. Endo et al., “Robot development for ARGOS challenge and 1st competition embracing verification test,” J. of the Robotics Society of Japan, Vol.35, No.2, pp. 123-134, 2017.
- [4] M. Quigley et al., “ROS: an open-source Robot Operating System,” ICRA Workshop on Open Source Software, Vol.3, No.3.2, 2009.
- [5] N. Ando et al., “RT-middleware: distributed component middleware for RT (robot technology),” IEEE/RSJ IEEE Int. Conf. on Intelligent Robots and Systems, pp. 3933-3938, 2005.
- [6] K. Peattie and F. M. Belz, “Sustainability marketing – An innovative conception of marketing,” Marketing Review St. Gallen, Vol.27, No.5, pp. 8-15, 2010.
- [7] B. Tuxworth, “From environment to sustainability: surveys and analysis of Local Agenda 21 process development in UK local authorities,” Local Environment, Vol.1, No.3, pp. 277-297, 1996.
- [8] Y. Nakabo, “Sustainability of robot systems,” J. of the Robotics Society of Japan, Vol.36, No.1, pp. 19-22, 2018.
- [9] V. DiLuoffo, W. R. Michalson, and B. Sunar, “Robot Operating System 2: The need for a holistic security approach to robotic architectures,” Int. J. of Advanced Robotic Systems, Vol.15, No.3, 1729881418770011, 2018.
- [10] J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You only look once: Unified, real-time object detection,” Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition, pp. 779-788, 2016.
- [11] E. W. Dijkstra, “A note on two problems in connexion with graphs,” Numerische Mathematik, Vol.1, No.1, pp. 269-271, 1959.
- [12] P. E. Hart, N. J. Nilsson, and B. Raphael, “A formal basis for the heuristic determination of minimum cost paths,” IEEE Trans. on Systems Science and Cybernetics, Vol.4, No.2, pp. 100-107, 1968.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.