Paper:
Prototyping Using a Mobile Robot Platform Equipped with Low-End In-Wheel Motors
Susumu Tarao*, Yasunori Fujiwara**, Naoaki Tsuda***, and Soichiro Takata*
*Department of Mechanical Engineering, National Institute of Technology, Tokyo College
1220-2 Kunugida-machi, Hachioji-shi, Tokyo 193-0997, Japan
**Department of Engineering for Future Innovation, National Institute of Technology, Ichinoseki College
Takanashi, Hagisho, Ichinoseki-shi, Iwate 021-8511, Japan
***Department of Intelligent Mechanical Engineering, National Institute of Technology, Wakayama College
77 Noshima, Nada-cho, Gobo-shi, Wakayama 644-0023, Japan

In the near future, autonomous mobile robots are expected to operate effectively in various locations, such as in living spaces as well as industrial establishments. Against this background, a new autonomous mobile robot platform was designed and prototyped in this research. For simplicity of design and easy assembly of the drive units, a robot with two low-end in-wheel motors is considered. It is also effective in saving space, and can be used for high-power operations and travelability in various road surface conditions. This paper presents a concept for developing a new type of autonomous mobile robot platform, its control system for autonomous operation, actual prototyping using this platform, and sample applications of this platform.
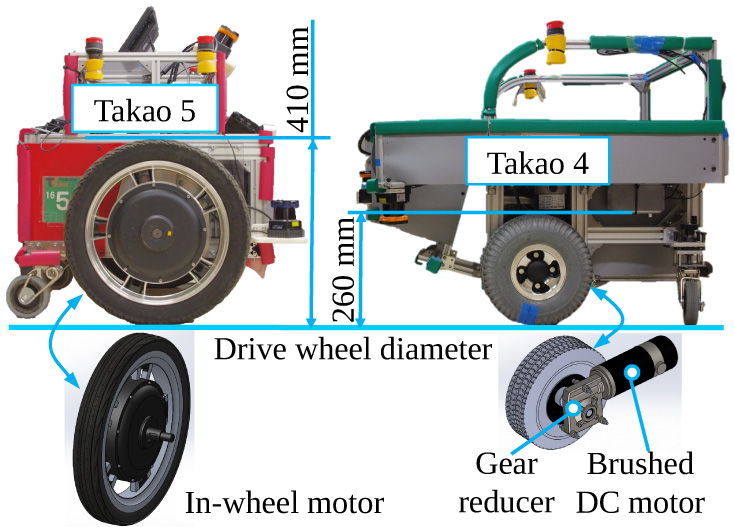
Mobile robot equipped with in-wheel motors
- [1] S. Yuta, “Open Experiment of Autonomous Navigation of Mobile Robots in the City: Tsukuba Challenge 2014 and the Results,” J. Robot. Mechatron., Vol.27, No.4, pp. 318-326, 2015.
- [2] S. Tarao, K. Asano, and T. Sato, “Process Analysis of Social Implementation Approach Based on Robot Education,” J. JSEE, Vol.63, No.1, pp. 62-67, 2015 (in Japanese).
- [3] A. Watts, A. Vallance, A. Whitehead, C. Hilton, and A. Fraser, “The Technology and Economics of In-Wheel Motors,” SAE Int. J. of Passenger Cars – Electronic and Electrical Systems, Vol.3, No.2, pp. 37-55, 2010.
- [4] K. Shimane, R. Ueda, and S. Tarao, “Prototyping of Kinematics Simulator for Supporting Autonomous Mobile Robot Development,” J. Robot. Mechatron., Vol.28, No.4, pp. 470-478, 2016.
- [5] T. Tomizawa, M. Shibuya, R. Tanaka, and T. Nishida, “Developing a Remotely Operated Portable Mobile Robot,” J. Robot. Mechatron., Vol.30, No.4, pp. 584-590, 2018.
- [6] Y. Kakigi, K. Inoue, M. Hijikata, and K. Ozaki, “Development of Flexible Cowl Covered Mobile Robot in Consideration with Safety and Design Property,” J. Robot. Mechatron., Vol.29, No.4, pp. 630-638, 2017.
- [7] Y. Kanuki and N. Ohta, “Development of Autonomous Robot with Simple Navigation System for Tsukuba Challenge 2015,” J. Robot. Mechatron., Vol.28, No.4, pp. 432-440, 2016.
- [8] S. Ohkawa, Y. Takita, H. Date, and K. Kobayashi, “Development of Autonomous Mobile Robot Using Articulated Steering Vehicle and Lateral Guiding Method,” J. Robot. Mechatron., Vol.27, No.4, pp. 337-345, 2015.
- [9] S. Tarao, Y. Fujiwara, N. Tsuda, and S. Takata, “Development of Autonomous Mobile Robot Platform Equipped with a Drive Unit Consisting of Low-End In-Wheel Motors,” Proc. 2020 5th Int. Conf. on Control and Robotics Engineering (ICCRE2020), pp. 42-47, 2020.
- [10] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” MIT Press, 2005.
- [11] J. Borenstein and L. Feng, “Gyrodometry: A New Method for Combining Data from Gyros and Odometry in Mobile Robots,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 423-428, 1996.
- [12] Y. Pyo, H. Cho, R. Jung, and T. Lim, “ROS Robot Programming,” Robotis Co., Ltd., 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.