Paper:
Method to Expand the CMAC Model to Composite-Type Model
Jiro Morimoto*, Makoto Horio**, Yoshio Kaji*, Junji Kawata*, Mineo Higuchi*, and Shoichiro Fujisawa*
*Tokushima Bunri University
1314-1 Shido, Sanuki-si, Kagawa 769-2193, Japan
**Art Information Institute
1968 Hara, Mure, Takamatsu, Kagawa 761-0123, Japan

Neural networks (NNs) are effective for the learning of nonlinear systems, and thus they achieve satisfactory results in various fields. However, they require significant amount of training data and learning time. Notably, the cerebellar model articulation controller (CMAC), which is modeled after the cerebellar neural transmission system, proposed by Albus can effectively reduce learning time, compared with NNs. The CMAC model is often used to learn nonlinear systems that have continuously changing outputs, i.e., regression problems. However, the structure of the CMAC model must be expanded to apply it to classification problems as well. Additionally, the CMAC model finds it difficult to simultaneously classify categories and estimate their proportional linear measure because designated learning algorithms are required for both regression and classification problems. Therefore, we aim to build a composite-type CMAC model that combines classification and regression algorithms to simultaneously classify categories and estimate their proportional linear measures.
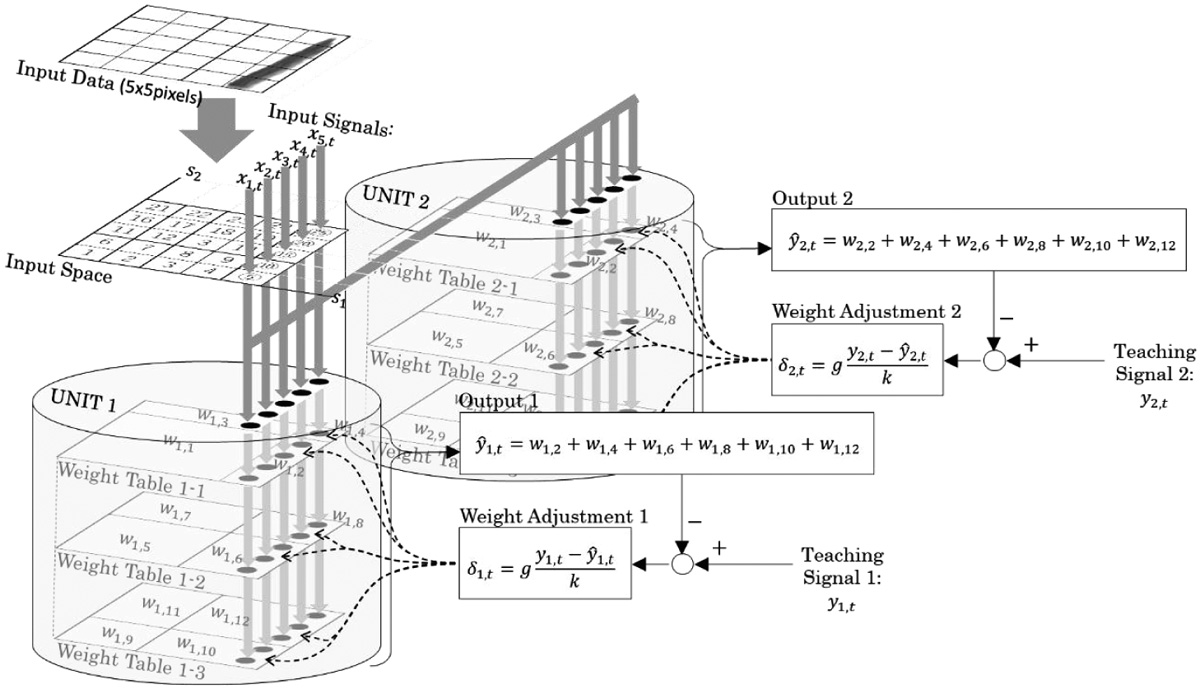
Structure of the expanded CMAC model
- [1] S. Nakamura, T. Hasegawa, T. Hiraoka, Y. Ochiai, and S. Yuta, “Person Searching Through an Omnidirectional Camera Using CNN in the Tsukuba Challenge,” J. Robot. Mechatron., Vol.30, No.4, pp. 540-551, doi: 10.20965/jrm.2018.p0540, 2018.
- [2] O. Sugiyama, S. Uemura, A. Nagamine, R. Kojima, K. Nakamura, and K. Nakadai, “Outdoor Acoustic Event Identification with DNN Using a Quadrotor-Embedded Microphone Array,” J. Robot. Mechatron., Vol.29, No.1, pp. 188-197, doi: 10.20965/jrm.2017.p0188, 2017.
- [3] A. Carballo, S. Seiya, J. Lambert, H. Darweesh, P. Narksri, L. Y. Morales, N. Akai, E. Takeuchi, and K. Takeda, “End-to-End Autonomous Mobile Robot Navigation with Model-Based System Support,” J. Robot. Mechatron., Vol.30, No.4, pp. 563-583, doi: 10.20965/jrm.2018.p0563, 2018.
- [4] K. Ishii, E. Hayashi, N. B. Misron, and B. Thornton, “Special Issue on Advanced Robotics in Agriculture, Forestry and Fisheries,” J. Robot. Mechatron., Vol.30, No.2, pp. 163-164, doi: 10.20965/jrm.2018.p0163, 2018.
- [5] M. Shigeta, R. Ike, H. Takemura, and H. Ohwada, “Automatic Measurement and Determination of Body Condition Score of Cows Based on 3D Images Using CNN,” J. Robot. Mechatron., Vol.30, No.2, pp. 206-213, doi: 10.20965/jrm.2018.p0206, 2018.
- [6] N. Yalta, K. Nakadai, and T. Ogata, “Sound Source Localization Using Deep Learning Models,” J. Robot. Mechatron., Vol.29, No.1, pp. 37-48, doi: 10.20965/jrm.2017.p0037, 2017.
- [7] J. S. Albus, “A New Approach to Manipulator Control: The Cerebellar Model Articulation Controller (CMAC),” Trans. ASME J. Dynam. Syst., Meas., Contr., Vol.97, pp. 220-227, 1975.
- [8] J. S. Albus, “Data Storage in the Cerebellar Model Articulation Controller (CMAC),” Trans. ASME J. Dynam. Syst., Meas., Contr., Vol.97, pp. 228-233, 1975.
- [9] K. Koiwai, Y. Liao, T. Yamamoto, T. Nanjo, Y. Yamazaki, and Y. Fujimoto, “Feature Extraction for Excavator Operation Skill Using CMAC,” J. Robot. Mechatron., Vol.28, No.5, pp. 715-721, doi: 10.20965/jrm.2016.p0715, 2016.
- [10] S. Fujisawa, R. Kurozumi, R. Onishi, K. Kawada, and T. Yamamoto, “Path Tracking Control by Online Learning using CMAC for an Omnidirectional Mobile Robots,” IEEJ Trans. on Industry Applications, Vol.122, No.9, pp. 910-917, 2002 (in Japanese).
- [11] T. Yamamoto, R. Kurozumi, and S. Fujisawa, “A design of CMAC based intelligent PID controllers,” Artificial Neural Networks and Neural Information Processing, Lecture Notes in Computer Science, Vol.2714, pp. 471-478, 2003.
- [12] K. Koiwai, K. Kawada, and T. Yamamoto, “Design and Experimental Evaluation of an Intelligent PID Controller using CMAC,” Proc. of IEEE Int. Conf. on Networking, Sensing and Control, Okayama, pp. 740-745, 2009.
- [13] K. Yamada, “Expression of Continuous State and Action Spaces for Q-Learning Using Neural Networks and CMAC,” J. Robot. Mechatron., Vol.24, No.2, pp. 330-339, 2012.
- [14] R. Kurozumi, T. Yamamoto, S. Fujisawa, and O. Sueda, “Development of Training Equipment with Adaptive and Learning Using a Balloon Actuator-Sensor System,” J. Robot. Mechatron., Vol.21, No.1, pp. 156-163, 2009.
- [15] Y. Akisato, K. Suzuki, and A. Ohuchi, “GA-Based Q-CMAC Applied to Airship Evasion Problem,” J. Robot. Mechatron., Vol.10, No.5, pp. 431-438, 1998.
- [16] F. Saito, T. Fukuda, and F. Arai, “Motion Control of the Brachiation Type of Mobile Robot Using Cerebellar Neural Model,” J. Robot. Mechatron., Vol.4, No.5, pp. 422-429, 1992.
- [17] S. Wakitani, T. Nawachi, G. Martins, and T. Yamamoto, “Design and Implementation of a Data-Oriented Nonlinear PID Controller,” J. Adv. Comput. Intell. Intell. Inform., Vol.17, No.5, pp. 690-698, 2013.
- [18] C. Lin and H. Kim, “CMAC-based adaptive critic self-learning control,” IEEE Trans. Neural Networks, Vol.2, No.5, pp. 530-533, 1991.
- [19] Y. Hirashima, Y. Iiguni, and N. Adachi, “A CMAC Learning Method Using the Kalman Filter,” Trans. of the SICE, Vol.34, No.8, pp. 1066-1073, 1998 (in Japanese).
- [20] C. S. Lin and H. Kim, “Selection of Learning Parameters for CMAC-Based Adaptive Critic Learning,” IEEE Trans. NN, Vol.6, No.3, pp. 642-647, 1995.
- [21] H. Kim and C. Lin, “Use of Adaptive Resolution for Better CMAC Learning,” IEEE Int. Joint Conf. on Neural Networks, pp. 517-522, 1992.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.