Paper:
High Accuracy and Short Delay 1ch-SSVEP Quadcopter-BMI Using Deep Learning
Kazumi Ishizuka, Nobuaki Kobayashi, and Ken Saito
Nihon University
7-24-1 Narashinodai, Funabashi, Chiba 274-8501, Japan

This study considers a brain-machine interface (BMI) system based on the steady state visually evoked potential (SSVEP) for controlling quadcopters using electroencephalography (EEG) signals. An EEG channel with a single dry electrode, i.e., without conductive gel or paste, was utilized to minimize the load on users. Convolutional neural network (CNN) and long short-term memory (LSTM) models, both of which have received significant research attention, were used to classify the EEG data obtained for flickers from multi-flicker screens at five different frequencies, with each flicker corresponding to a drone movement, viz., takeoff, forward and sideways movements, and landing. The subjects of the experiment were seven healthy men. Results indicate a high accuracy of 97% with the LSTM model for a 2 s segment used as the unit of processing. High accuracy of 93% for 0.5 s segment as a unit of processing can remain in the LSTM classification, consequently decreasing the delay of the system that may be required for safety reasons in real-time applications. A system demonstration was undertaken with 2 out of 7 subjects controlling the quadcopter and monitoring movements such as takeoff, forward motion, and landing, which showed a success rate of 90% on average.
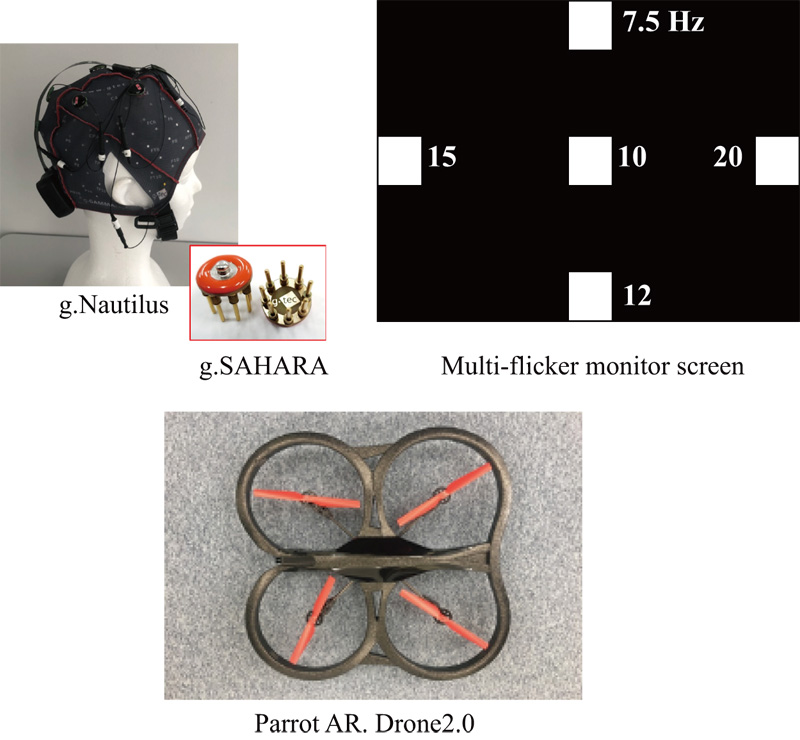
The BMI system for drone control
- [1] Statistics Bureau, Ministry of Internal Affairs and Communications Japan, “2016 Census, Basic Aggregation on Population, National results,” September 18, 2016.
- [2] National Institute of Population and Social Security Research, “Japan’s estimated future population,” April 2017.
- [3] Z. Liu et al., “A High-Resolution Dry Electrode Array for SSVEP-Based Brain-Computer Interfaces,” Proc. of IEEE Int. IEEE/EMBS Conf. on Neural Engineering (NER), pp. 811-814, 2019.
- [4] Z. Lin et al., “Frequency recognition based on canonical correlation analysis for SSVEP-based BCIs,” IEEE Trans. on Biomedical Engineering, Vol.53, No.12, pp. 2610-2614, 2006.
- [5] J. Thomas et al., “Deep learning-based classification for brain-computer interfaces,” Proc. of IEEE Int. Conf. on Systems, Man, and Cybernetics (SMC), pp. 234-239, 2017.
- [6] N, Khadijah, N. Aznan et al., “On the Classification of SSVEP-Based Dry-EEG Signals via Convolutional Neural Networks,” Proc. of IEEE Int. Conf. on Systems, Man, and Cybernetics (SMC), pp. 3726-3731, 2018.
- [7] M. Attia, I. Hettiarachchi, M. Hossny, and S. Nahavandi, “A Time Domain Classification of Steady-state Visual Evoked Potentials Using Deep Recurrent-Convolutional Neural Networks,” IEEE 15th Int. Symp. on Biomedical Imaging (ISBI 2018), pp. 766-769, 2018.
- [8] B. H. Kim, M. Kim, and S. Jo, “Quadcopter flight control using a low-cost hybrid interface with EEG-based classification and eye tracking,” Computers in Biology and Medicine, Vol.51, pp. 82-92, 2014.
- [9] M. Wang, R. Li, R. Zhang, G. Li, and D. Zhang, “A Wearable SSVEP-Based BCI System for Quadcopter Control Using Head-Mounted Device,” IEEE Access, Vol.6, pp. 26789-26798, 2018.
- [10] S. Kanoga, M. Nakanishi, A. Murai, M. Tada, and A. Kanemura, “Robustness analysis of decoding SSVEPs in humans with head movements using a moving visual flicker,” J. of Neural Engineering, Vol.17, No.1, 016009, 2019.
- [11] S. Hochreiter and J. Schmidhuber, “Long short-term memory,” Neural Computation, Vol.9, No.8, pp. 1735-1780, 1997.
- [12] C. Cortes and V. Vapnik, “Support-vector networks,” Machine Learning, Vol.20, Issue 3, pp. 273-297, 1995.
- [13] B. Kamiński, M. Jakubczyk, and P. Szufel, “A framework for sensitivity analysis of decision trees,” Central European J. of Operations Research, Vol.26, Issue 1, pp. 135-159, 2018.
- [14] R. A. Fisher, “The Use of Multiple Measurements in Taxonomic Problems,” Annals of Eugenics, Vol.7, Issue 2, pp. 179-188, 1936.
- [15] R. A. Johnson and D. W. Wichern, “Applied Multivariate Statistical Analysis,” Prentice Hall, 1988.
- [16] N. Altman, “An Introduction to Kernel and Nearest Neighbor Nonparametric Regression,” The American Statistician, Vol.46, Issue 3, pp. 175-185, 1992.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.