Paper:
Effect of Trunk Swinging Behaviors on Planar Bipedal Walking with an Upper Body on Gentle Slope
Toyoyuki Honjo and Hidehisa Yoshida
National Defense Academy of Japan
1-10-20 Hashirimizu, Yokosuka, Kanagawa 239-8686, Japan

Bipedal walking locomotion is one of the characteristics of human behavior. Both the lower body and the upper body (trunk) behaviors affect walking characteristics. To achieve a suitable gait, it is important to understand the effect of the trunk behavior. Therefore, in this paper, the effects of three types of trunk swinging behavior on planar bipedal gait in a model with an upper body – forward swinging, backward swinging, and no swinging – were evaluated using numerical simulations. To reduce control inputs and reflect the effect of upper body behavior, an underactuated bipedal walker without knee joints was adopted. This walker walked down a gentle slope using only hip actuation between the stance leg and the trunk. As a result, unique gait characteristics that depended on the direction of the trunk swinging behavior were found, including a longer step length and a lower-frequency gait with forward trunk swinging behavior and a shorter step length and higher-frequency gait with smaller angular momentum with backward trunk swinging behavior.
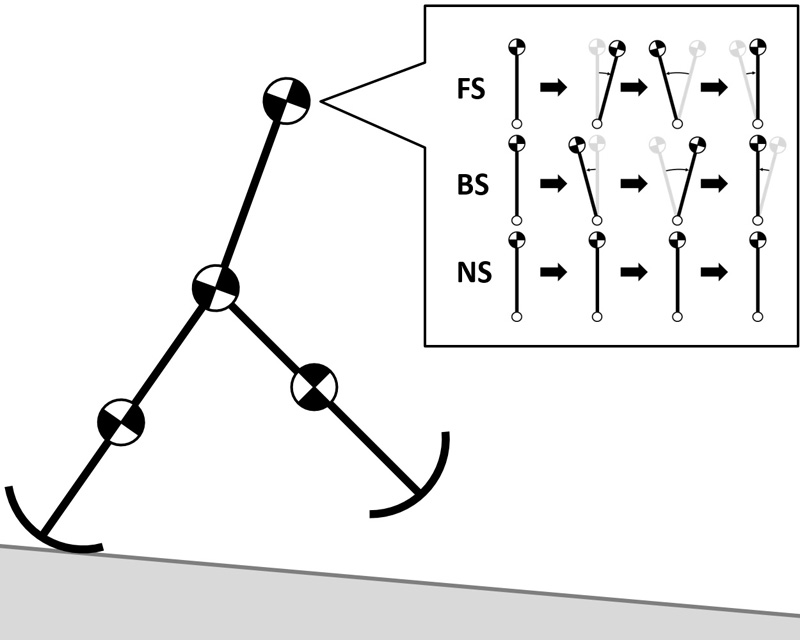
Biped walker with three types of trunk swing
- [1] T. McGeer, “Passive Dynamic Walking,” Int. J. of Robotics Research, Vol.9, No.2, pp. 62-82, 1990.
- [2] M. Haruna, M. Ogino, K. Hosoda, and M. Asada, “Yet another humanoid walking – passive dynamic walking with torso under simple control,” Proc. of the 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 259-264, 2001.
- [3] T. Narukawa, M. Takahashi, and K. Yoshida, “Biped locomotion on level ground by torso and swing-leg control based on passive-dynamic walking,” Proc. of the 2005 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4009-4014, 2005.
- [4] T. Das and R. Mukherjee, “Dynamic analysis of rectilinear motion of a self-propelling disc with unbalance masses,” Trans. ASME J. Appl. Mech., Vol.68, No.1, pp. 58-66, 2001.
- [5] L. L. Flynn, R. Jafari, and R. Mukherjee, “Active Synthetic-Wheel Biped With Torso,” IEEE Trans. on robotics, Vol.26, No.5, pp. 816-826, 2010.
- [6] S. Faraji and A. J. Ijsppert, “3LP: A linear 3D-walking model including torso and swing dynamics,” Int. J. of Robotics Research, Vol.36, No.4, pp. 436-455, 2017.
- [7] M. Wisse, A. L. Schwab, and F. C. T. van der Helm, “Passive dynamic walking model with upper body,” Robotica, Vol.22, No.6, pp. 681-688, 2004.
- [8] M. Wisse, D. G. E. Hobbelen, and A. L. Schwab, “Adding an Upper Body to passive Dynamic Walking Robots by Means of a Bisecting Hip Mechanism,” IEEE Trans. on robotics, Vol.23, No.1, pp. 112-123, 2007.
- [9] T. Narukawa, M. Takahashi, and K. Yoshida, “Numerical simulations of level-ground walking based on passive walk for planar biped robots with torso by hip actuators,” JSME J. Syst. Des. Dyn., Vol.2, No.2, pp. 463-474, 2008.
- [10] T. Narukawa, M. Takahashi, and K. Yoshida, “Efficient walking with optimization for a planar biped walker with a torso by hip actuators and springs,” Robotica, Vol.29, No.4, pp. 641-648, 2011.
- [11] T. Hayashi, F. Asano, Z. W. Luo, A. Nagano, K. Kaneko, and A. Kato, “Experimental Study of a Parametrically Excited Dynamical Bipedal Walker with Counterweights,” Proc. of the 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 81-86, 2009.
- [12] T. Hayashi, K. Kaneko, F. Asano, and Z. W. Luo, “Experimental Study of Dynamic Bipedal Walking Based on the Principle of Parametric Excitation with Counterweights,” Advanced Robotics, Vol.25, pp. 273-287, 2011.
- [13] K. An, C. Li, Z. Fang, and C. Liu, “Effects of upper body parameters on biped walking efficiency studied by dynamic optimization,” Int. J. of Advanced Robotic Systems, Vol.14, No.1, pp. 1-13, 2016.
- [14] T. Honjo, A. Nagano, and Z. W. Luo, “Parametrically excited inverted double pendulum and efficient bipedal walking with an upper body,” Robotica, Vol.31, No.6, pp. 875-886, 2013.
- [15] T. Geng, “Fast Walking with Rhythmic Sway of Torso in A 2D Passive Ankle Walker,” IEEE Trans. Robotics, Vol.30, No.3, pp. 753-758, 2014.
- [16] R. Bao, and T. Geng, “Fast Walking with Rhythmic Sway of Torso in a 2D Passive Ankle Walker,” Proc. of the 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4363-4368, 2018.
- [17] K. Deng, M. Zhao, and W. Xu, “Passive Dynamic Walking with Torso,” Proc. of the 2012 IEEE Int. Conf. on Mechatronics and Automation, pp. 273-278, 2012.
- [18] M. Popovic, A. Holfmann, and H. Herr, “Angular momentum Regulation during Human Walking : Biomechanics and Control,” Proc. of the 2004 IEEE Int. Conf. on Robotics and Automation, pp. 2405-2411, 2004.
- [19] H. Herr and M. Popovic, “Angular momentum in human walking,” J. of Experimental Biology, Vol.211, pp. 467-481, 2008.
- [20] B. C. Bennett, S. D. Russell, P. Sheth, and M. F. Abel, “Angular momentum of walking at different speeds,” Human Movement Science, Vol.29, No.1, pp. 114-124, 2010.
- [21] A. K. Silverman, J. M. Wilken, E. H. Sinitski, and R. R. Neptune, “Whole-body angular momentum in incline and decline walking,” J. of Biomechanics, Vol.45, No.6, pp. 965-971, 2012.
- [22] A. Goswami, B. Thuilot, and B. Espiau, “A Study of the Passive Gait of a Compass-Like Biped Robot: Symmetry and Chaos,” Int. J. of Robotics Research, Vol.17, No.12, pp. 1282-1301, 1998.
- [23] F. Asano and Z. Luo, “Pseudo virtual passive dynamic walking and effect of upper body as counterweight,” Proc. of the 2008 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2934-2939, 2008.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.