Paper:
Effects of Congestion on Swarm Performance and Autonomous Specialization in Robotic Swarms
Motoaki Hiraga and Kazuhiro Ohkura
Hiroshima University
1-4-1 Kagamiyama, Higashi-hiroshima, Hiroshima 739-8527, Japan

This paper focuses on the effect of congestion on swarm performance by considering the number of robots and their size. Swarm robotics is the study of a large group of autonomous robots from which collective behavior emerges without reliance on any centralized control. Due to the fact that robotic swarms are composed of a large number of robots, it is important to consider the congestion among them. However, only a few studies have focused on the relationship between the congestion and the performance of robotic swarms; moreover, these studies only discuss the effect of the number of robots. In this study, experiments were conducted by computer simulation and carried out by varying both the number of robots and the size of the robots in a path formation task. The robot controller was designed with an evolutionary robotics approach. The results show that not only the number of robots but also their size are essential features in the relationship between congestion and swarm performance. In addition, autonomous specialization within the robotic swarm emerged in situations with moderate congestion.
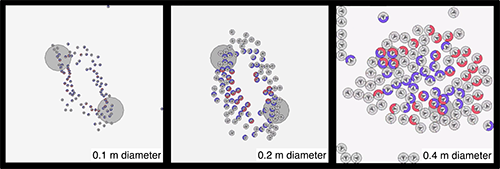
Comparison of the collective behavior in a path formation task with different robot size
- [1] E. Şahin, “Swarm robotics: From sources of inspiration to domains of application,” Swarm Robotics, Vol.3342, pp. 10-20, Springer, 2005.
- [2] M. Dorigo, M. Birattari, and M. Brambilla, “Swarm robotics,” Scholarpedia, Vol.9, No.1, p. 1463, 2014.
- [3] K. Lerman and A. Galstyan, “Mathematical model of foraging in a group of robots: Effect of interference,” Autonomous Robots, Vol.13, No.2, pp. 127-141, 2002.
- [4] H. Hamann, “Towards swarm calculus: Urn models of collective decisions and universal properties of swarm performance,” Swarm Intelligence, Vol.7, Nos.2-3, pp. 145-172, 2013.
- [5] H. Hamann, “Swarm Robotics: A Formal Approach,” Springer, 2018.
- [6] L. Soriano Marcolino, Y. Tavares dos Passos, Á. Fonseca de Souza et al., “Avoiding target congestion on the navigation of robotic swarms,” Autonomous Robots, pp. 1-24, 2016.
- [7] S. Nolfi and D. Floreano, “Evolutionary Robotics: The Biology, Intelligence, and Technology of Self-Organizing Machines,” MIT Press, 2000.
- [8] V. Trianni, “Evolutionary Swarm Robotics: Evolving Self-Organising Behaviours in Groups of Autonomous Robots,” Studies in Computational Intelligence, Vol.108, 2008.
- [9] V. Trianni, R. Groß, T. H. Labella, E. Şahin, and M. Dorigo, “Evolving aggregation behaviors in a swarm of robots,” Advances in Artificial Life, Lecture Notes in Computer Science, Vol.2801, pp. 865-874, 2003.
- [10] O. Soysal, E. Bahçeci, and E. Şahin, “Aggregation in swarm robotic systems: Evolution and probabilistic control,” Turkish J. of Electrical Engineering & Computer Sciences, Vol.15, No.2, pp. 199-225, 2007.
- [11] M. Gauci, J. Chen, T. J. Dodd, and R. Groß, “Evolving aggregation behaviors in multi-robot systems with binary sensors,” M. A. Hsieh and G. Chirikjian (Eds.), “Distributed Autonomous Robotic Systems,” pp. 355-367, Springer, 2014.
- [12] G. Baldassarre, S. Nolfi, and D. Parisi, “Evolving mobile robots able to display collective behaviors,” Artificial Life, Vol.9, No.3, pp. 255-267, 2003.
- [13] R. Gross and M. Dorigo, “Towards group transport by swarms of robots,” Int. J. of Bio-Inspired Computation, Vol.1, Nos.1-2, pp. 1-13, 2009.
- [14] T. Yu, T. Yasuda, K. Ohkura, Y. Matsumura, and M. Goka, “Cooperative transport by a swarm robotic system based on CMA-NeuroES approach,” J. Adv. Comput. Intell. Intell. Inform., Vol.17, No.6, pp. 932-942, 2013.
- [15] M. H. Mohammed Alkilabi, A. Narayan, and E. Tuci, “Cooperative object transport with a swarm of e-puck robots: Robustness and scalability of evolved collective strategies,” Swarm Intelligence, Vol.11, No.3-4, pp. 185-209, 2017.
- [16] V. Sperati, V. Trianni, and S. Nolfi, “Self-organised path formation in a swarm of robots,” Swarm Intelligence, Vol.5, No.2, pp. 97-119, 2011.
- [17] L. Bayındır, “A review of swarm robotics tasks,” Neurocomputing, Vol.172, pp. 292-321, 2016.
- [18] X. Yao, “Evolving artificial neural networks,” Proc. of the IEEE, Vol.87, No.9, pp. 1423-1447, 1999.
- [19] D. Floreano, P. Dürr, and C. Mattiussi, “Neuroevolution: From architectures to learning,” Evolutionary Intelligence, Vol.1, No.1, pp. 47-62, 2008.
- [20] M. Hiraga, T. Yasuda, and K. Ohkura, “Evolutionary acquisition of autonomous specialization in a path-formation task of a robotic swarm,” J. Adv. Comput. Intell. Intell. Inform., Vol.22, No.5, pp. 621-628, 2018.
- [21] M. Hiraga, Y. Wei, T. Yasuda, and K. Ohkura, “Evolving autonomous specialization in congested path formation task of robotic swarms,” Artificial Life and Robotics, Vol.23, No.4, pp. 547-554, 2018.
- [22] H.-G. Beyer and H.-P. Schwefel, “Evolution strategies: A comprehensive introduction,” Natural Computing, Vol.1, No.1, pp. 3-52, 2002.
- [23] A. E. Eiben and J. E. Smith, “Introduction to Evolutionary Computing,” Springer, 2003.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.