Paper:
Implement a Program with Contents of Measurement and Control for Elementary School Science Classes
Shinichi Imai*, Youichirou Ueno**, and Kazunori Kajihara***
*Department of Technology Sciences, Tokyo Gakugei University
4-1-1 Nukuikita-machi, Koganei-shi, Tokyo 184-8501, Japan
**Kinoe Elementary School
249 Okiura, Osakikamijima-town, Toyota-gun, Hiroshima 725-0402, Japan
***National Institute of Technology, Hiroshima College
4272-1 Higashino, Osakikamijima-town, Toyota-gun, Hiroshima 725-0231, Japan

In today’s day and age, we encounter a wide array of electronic devices such as personal computers, game machines, mobile phones, etc. in our daily life. Such devices are controlled through invisible sites. The measurement and control of these devices constitute such an essential technology for the modern society that they have to be formally studied at junior high school and beyond. To facilitate the smooth transition of students into the process of learning about such devices, education about them should preferably be introduced at the early stage of elementary school. However, that will make the elementary school’s curriculum too restrictive, as activities not described in the government course of studies cannot be implemented. In this study, therefore, we have implemented graduation work activities (teaching for measurement and control) in accordance with the government course of studies to teach science at elementary schools and have verified its effectiveness.
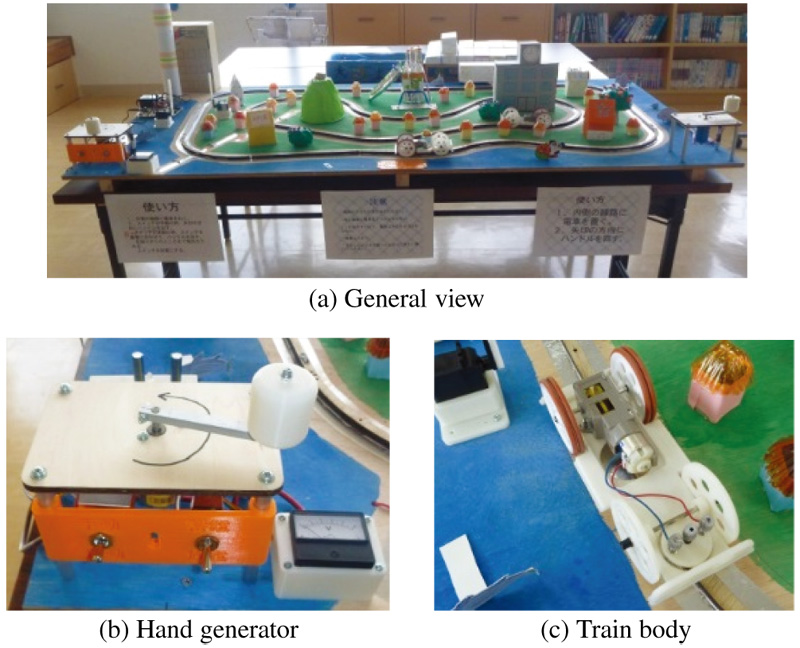
Diorama production on the subject of measurement and control
- [1] Y. Ohnishi, K. Honda, R. Nishioka, S. Mori, and K. Kawada, “Robotics Programming Learning for Elementary and Junior High School Students,” J. Robot. Mechatron., Vol.29, No.6, pp. 992-998, 2017.
- [2] T. Noguchi, H. Kajiwara, K. Chida, and S. Inamori, “Development of a Programming Teaching-Aid Robot with Intuitive Motion Instruction Set,” J. Robot. Mechatron., Vol.29, No.6, pp. 980-991, 2017.
- [3] T. Asai, K. Osuka, M. Ishikawa, and M. Inoue, “A Motivational Lecture Using an Experimental Control System to Get Personal Experience and its Effectiveness,” Trans. of the Society of Instrument and Control Engineers, Vol.48, No,10, pp. 622-631, 2012 (in Japanese).
- [4] K. Nakada, M. Tsunematsu, T. Kihara, T. Hattori, T. Tokiwa, and H. Fukuda, “CISTEM Education with Robotic Platform: for Human-Human Synchrony and Human-Machine Synchrony,” J. Robot. Mechatron., Vol.29, No.6, pp. 969-979, 2017.
- [5] R. Nishioka, Y. Ohnishi, and S. Mori, “Development of Autonomous Robots for Elementary School Students,” The Papers of Technical Meeting on “Control,” IEE Japan, CT-14-23, pp. 47-48, 2014 (in Japanese).
- [6] K. Kawada, M. Nagamatsu, and T. Yamamoto, “An Approach to Rescue Robot Workshops for Kindergarten and Primary School Children,” J. Robot. Mechatron., Vol.25, No.3, pp. 521-528, 2013.
- [7] D. Misaki and K. Arai, “Practice of School Education Using Micro Robots and Verification of its Effectiveness,” J. Robot. Mechatron., Vol.23, No.5, pp. 709-716, 2011.
- [8] A. Yorita and N. Kubota, “Robot Assisted Instruction in Elementary School Based on Robot Theater,” J. Robot. Mechatron., Vol.23, No.5, pp. 893-901, 2011.
- [9] A. Eguchi, “Educational Robotics for Elementary School Classroom,” Proc. of Society for Information Technology & Tracher Education Int. Conf. 2007, pp. 2542-2549, 2007.
- [10] S. Imai and Y. Ueno, “Practice of collaboration with institutions of Elementary educational institution in graduation production,” The Papers of Technical Meeting on Control, IEE Japan, CT2015(57-66), pp. 9-14, 2015 (in Japanese).
- [11] S. Imai, “Development of the goods commodity for Training System,” The Bulletin of the National Institute of Technology, Hiroshima College, Vol.36, pp. 1-6, 2014 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.