Paper:
Design of an Educational Hardware in the Loop Simulator for Model-Based Development Education
Shin Wakitani and Toru Yamamoto
Hiroshima University
1-4-1 Kagamiyama, Higashi-hiroshima, Hiroshima 739-8527, Japan

This study proposes a HIL simulator for model-based development (MBD) education and checks its behavior. In recent years, product structures have become diverse and complex; further, short-term development with limited resources is required to respond to consumers’ needs. MBD using computer simulation is effective for the efficient execution of such developments. An increasing number of companies have introduced MBD; however, engineers who are newly engaged in such development do not always have sufficient experience. Therefore, in this study, the authors have proposed an educational program to learn the basics of MBD in a short period of time. However, the introduction of industrial hardware in the loop (HIL) simulator, which plays an important role in MBD, is expensive. The present study proposes a method of designing an educational HIL simulator by using a microcomputer board. The proposed educational HIL simulator can reduce the production cost of industrial HIL simulators and can be provided to individual participants undergoing MBD training. Using numerical examples and experimental results, we show that the proposed HIL simulator can perform a simulation of experimental equipment used in actual MBD education.
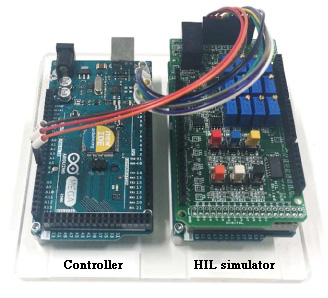
Educational Hardware in the Loop (HIL) Simulator
- [1] A. Ohata and B. R. Kenneth, “Improving model-based design for automotive control systems development,” Proc. 17th World Congr. 2008, pp. 1062-1065, 2008.
- [2] H. Ogata and T. Katayama, “Skill standards for model based development engineers in the automotive industry,” Vol.8, pp. 240-244, 2009.
- [3] P. C. Nissimagoudar, V. Mane, H. M. Gireesha, H. G. Wali, and N. C. Iyer, “Practicing model based design and industrial approach for a course on automotive electronics,” J. of Engineering Education Transformations, Vol.31, No.3, pp. 206-214, 2018.
- [4] J. Krasner, “Comparing embedded design outcomes with and without model-based design,” American Technology Int. White Paper, 10, 2010.
- [5] S. Wakitani and T. Yamamoto, “Practice of model-based development for automotive engineers,” Proc. of 2017 IEEE Frontiers in Education Conf. (FIE), pp. 1-4, 2017.
- [6] R. Isermann, J. Schaffnit, and S. Sinsel, “Hardware-in-the-loop simulation for the design and testing of engine-control systems,” Control Engineering Practice, Vol.7, pp. 643-653, 1999.
- [7] S. Nabi, M. Balike, J. Allen, and K. Rzemien, “An overview of hardware-in-the-loop testing systems at visteon,” SAE Technical Paper, 2004-01-1240, 2018.
- [8] M. Bacic, “On hardware-in-the-loop simulation,” Proc. of the 44th IEEE Conf. on Decision and Control, and the European Control Conf. 2005, pp. 12-15, 2005.
- [9] A. Sala and J. Bondia, “Teaching experience with hardware-in-the-loop simulation,” IFAC Proc., Vol.39, No.6, pp. 123-128, 2006.
- [10] J. Reedy, S. Lunzman, and B. Mekari, “Model based design accelerates the development of mechanical locomotive controls,” SAE Technical Paper, SAE Int., October 2010.
- [11] G. Gambino, G. Siano, G. Palmieri, W. Mauro, G. Vanoli, F. Criscuolo, D. DelCogliano, F. de Rossi, and L. Glielmo, “A low-cost hil platform for testing professional refrigerators controllers,” IFAC Proc. Volumes, Vol.47, No.3, pp. 3104-3109, 2014.
- [12] T. Yamamoto, S. Wakitani, Y. Harada, N. Kagawa, T. Adachi, T. Oki, and S. Harada, “Model Based Development – Learning with Practical Training –,” Corona Publishing Co., Ltd., 2018 (in Japanese).
- [13] R. Grepl, “Real-time control prototyping in matlab simulink review of tools for research and education in mechatronics,” Proc. of the 2011 IEEE Int. Conf. on Mechatronics, pp. 13-15, 2011.
- [14] I. Tejado, J. Serrano, E. Perez, D. Torres, and B. M.Vinagre, “Low-cost hardware-in-the-loop testbed of a mobile robot to support learning in automatic control and robotics,” IFAC-PapersOnLine, Vol.49, No.6, pp. 242-247, 2016.
- [15] S. Abourida and J. Belanger, “Real-time platform for the control prototyping and simulation of power electronics and motor drives,” Proc. of the 3rd Int. Conf. on Modeling, Simulation and Applied Optimization, pp. 1-6, 2009.
- [16] C. Dufour, C. Andrade, and J. Belanger, “Real-time simulation technologies in education: a link to modern engineering methods and practices,” Proc. of the 11th Int. Conf. on Engineering and Technology Education (INTERTECH 2010), pp. 7-10, 2010.
- [17] B. Yang and C.-Y. J. Chen, “Development of a robotic platform for teaching model-based design techniques in dynamics and control program,” Proc. of 2011 ASEE Annual Conf. & Exposition, pp. 22.480.1-22.480.13, 2011.
- [18] J. Toman, Z. Ancik, and V. Singule, “Hardware-in-the-loop testing of control algorithms for brushless dc motor,” Mechatronics, pp. 165-173, 2011.
- [19] P. Tulpule, A. Rezaeian, A. Karumanchi, and S. Midlam-Mohler, “Model based design (mbd) and hardware in the loop (hil) validation: Curriculum development,” Proc. of 2017 American Control Conf. (ACC), pp. 5361-5366, 2017.
- [20] R. Vilanova and A. Visioli, “PID control in the Third Millennium: lessons learned and new approaches,” Springer, 2012.
- [21] Y. Okano and O. Kaneko, “Fictitious reference signal based real-time update of state feedback gains and its experimental verification,” J. Robot. Mechatron., Vol.28, No.5, pp. 625-632, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.