Development Report:
Development of a Multi-Master Communication Platform for Mobile Distributed Systems
Kwanwai Mak, Koichi Osuka, and Teruyo Wada
Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

This paper proposes a design of a multi-master communication platform for mobile distributed systems, which can be applied to distributed systems without concern on the formation. Experiments were conducted with the testing modules, and the result shows that synchronization of test modules can be effectively achieved with the aid of the platform.
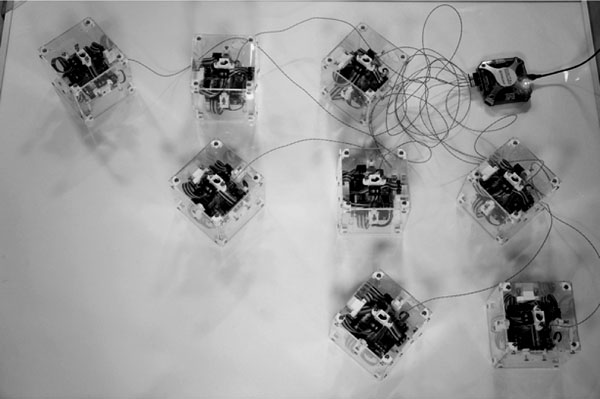
Multi-master communication platform
- [1] I. Navarro and F. Matía, “An introduction to swarm robotics,” ISRN Robotics, Vol.2013, 608164, 2012.
- [2] S. Corrigan, “Introduction to the controller area network (CAN),” Texas Instrument, 2008.
- [3] T. Izuchi, M. Hotta, T. Oomichi, S. Seki and J. Koyama, “Development of Network Plug-in Actuator,” J. Robot. Mechatron., Vol.19, No.2, pp. 232-242, 2007.
- [4] M. Yim, D. G. Duff, and K. D. Roufas, “PolyBot: a modular reconfigurable robot,” Proc. 2000 ICRA. Millennium Conf. IEEE Int. Conf. on Robotics and Automation., Vol.1, pp. 514-520, 2000.
- [5] H. Wei, Y. Chen, J. Tan, and T. Wang, “Sambot: A self-assembly modular robot system,” IEEE/ASME Trans. on Mechatronics, Vol.16, No.4, pp. 745-757, 2011.
- [6] Y. L. Liao and K. L. Su, “Multi-robot-based intelligent security system,” Artificial Life and Robotics, Vol.16, No.2, pp. 137-141, 2011.
- [7] S. Jiang, J. Cao, Y. Liu, J. Chen, and X. Liu, “Programming large-scale multi-robot system with timing constraints,” 2016 25th Int. Conf. on Computer Communication and Networks (ICCCN), pp. 1-9, 2016.
- [8] Á. Gutiérrez, A. Campo, M. Dorigo, J. Donate, F. Monasterio-Huelin, and L. Magdalena, “Open E-puck Range & Bearing Miniaturized Board for Local Communication in Swarm Robotics,” ICRA’09. IEEE Int. Conf. on. Robotics and Automation, pp. 3111-3116, 2009.
- [9] J. McLurkin, J. Rykowski, M. John, Q. Kaseman, and A. J. Lynch, “Using multi-robot systems for engineering education: Teaching and outreach with large numbers of an advanced, low-cost robot,” IEEE Trans. on Education, Vol.56, No.1, pp. 24-33, 2013.
- [10] M. Rubenstein, C. Ahler, and R. Nagpal, “Kilobot: A low cost scalable robot system for collective behaviors,” 2012 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3293-3298, 2012.
- [11] I. Illgen, H. Schrom, and E. Schnieder, “Infrared CAN Interface – Principles of CAN data transmission using infrared light,” Proc. of the 7th Int. CAN Conf. (iCC), 2000.
- [12] S. Camazine, J. L. Deneubourg, N. R. Franks, J. Sneyd, G. Theraulaz, and E. Bonabeau, “Self-organization in biological systems,” Princeton University Press, 2001.
- [13] F. Hartwich and A. Bassemir, “The configuration of the CAN bit timing,” Robert Bosch GmbH, 1999.
- [14] M. Mikawa, “Robust Wireless Communication for Small Exploration Rovers Equipped with Multiple Antennas by Estimating Attitudes of Rovers in Several Experimental Environments,” J. Robot. Mechatron., Vol.29, No.5, pp. 864-876, 2017.
- [15] D. Payton, R. Estkowski, and M. Howard, “Compound behaviors in pheromone robotics,” Robotics and Autonomous Systems, Vol.44, Nos.3-4, pp. 229-240, 2003.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.