Paper:
Navigation Based on Metric Route Information in Places Where the Mobile Robot Visits for the First Time
Asahi Handa, Azumi Suzuki, Hisashi Date, Ryohsuke Mitsudome, Takashi Tsubouchi, and Akihisa Ohya
Graduate School of Systems and Information Engineering, University of Tsukuba
1-1-1 Tennodai Tsukuba-shi, Ibaraki 305-8573, Japan

In this study, we propose a navigation system that guides a robot at a location visited for the first time, without developing a map in advance. First, it estimates the position of a path that exists on the local map by matching the metric route information and the local map generated by simultaneous localization and mapping (SLAM); this is achieved by using a particle filter. Then, the robot travels to the destination along the estimated route. In this system, the geometric accuracy of the route information specified in advance and the accuracy of the map generated by SLAM are essential. Furthermore, it is necessary to recognize the traversable area. The experiment performed verifies the matching of the route information and local map. In the autonomous running experiment, we conduct a trial run on a course set up at the University of Tsukuba.
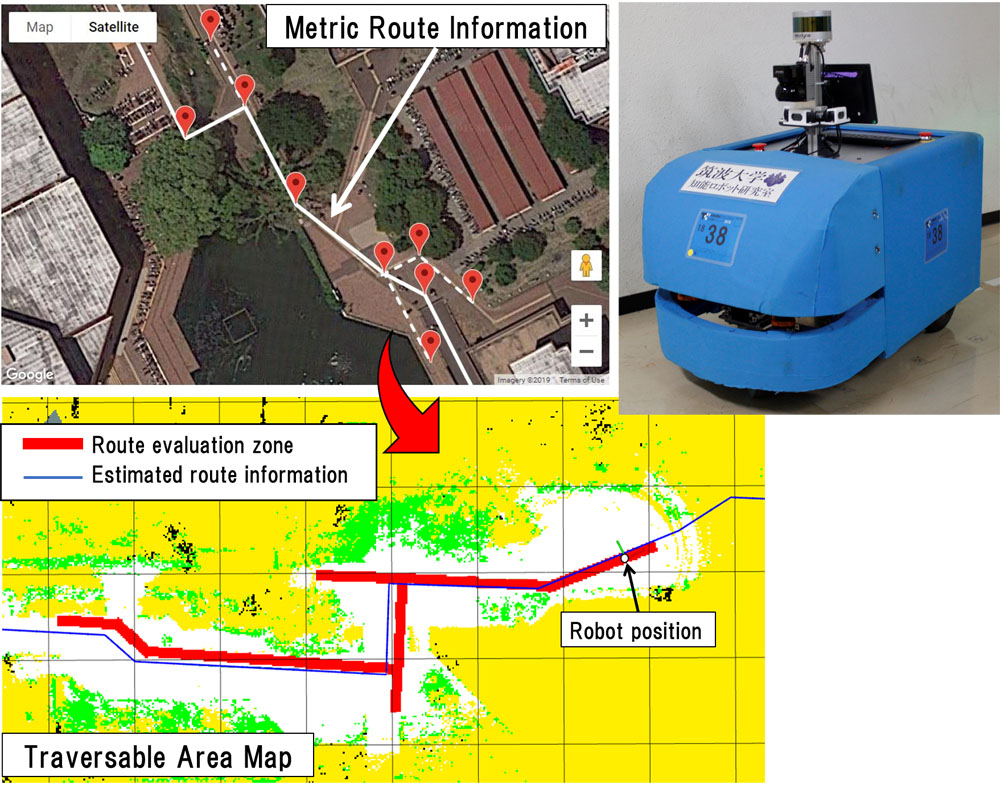
Navigation based on metric route information
- [1] A. Suzuki, H. Date, T. Tsubouchi, A. Ohya, K. Shigematsu, and R. Mitsudome, “Development of Navigation System Based on Metric Route Information,” Proc. of the 16th SICE SI Division Annual Conf., pp. 851-854, 2015 (in Japanese).
- [2] A. Suzuki, H. Date, T. Tsubouchi, A. Ohya, K. Shigematsu, and R. Mitsudome, “Mobile Robot Navigation Using Metric Route Information and SLAM,” Proc. of the 21st Robotics Symposia, pp. 256-261, 2016 (in Japanese).
- [3] A. Suzuki, H. Date, T. Tsubouchi, A. Ohya, K. Shigematsu, and R. Mitsudome, “Navigation of a Mobile Robot Based on Metric Route Map at Places to Visit for the First Time,” Proc. of 2016 JSME Conf. on Robotics and Mechatronics, 2A2-07a7, 2016 (in Japanese).
- [4] A. Suzuki, H. Date, T. Tsubouchi, A. Ohya, K. Shigematsu, and R.Mitsudome, “Navigation Dependent Solely on Metric Route Information as Prior Information,” Proc. of the 17th SICE SI Division Annual Conf., pp. 117-121, 2016 (in Japanese).
- [5] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” MIT Press, 2007.
- [6] P. Ranganathan, J. B. Hayet, M. Devy, S. Hutchinson, and F. Lerasle, “Topological navigation and qualitative localization for indoor environment using multi-sensory perception,” Robotics and Autonomous Systems, Vol.41, pp. 137-144, 2002.
- [7] S. Muramatsu, T. Tomizawa, S. Kudoh, and T. Suehiro, “Mobile Robot Navigation Utilizing the WEB Based Aerial Images Without Prior Teaching Run,” J. Robot. Mechatron., Vol.29, No.4, pp. 697-705, 2017.
- [8] K. Irie, M. Sugiyama, and M. Tomono, “Localization Using 2D Street Maps in Unfamiliar Environments,” Proc. of the 20th Robotics Symposia, pp. 157-164, 2015 (in Japanese).
- [9] P. Ruchti, B. Steder, M. Ruhnke, and W. Burgard, “Localization on OpenStreetMap data using a 3D laser scanner,” Proc. the IEEE Int. Conf. on Robotics and Automation, pp. 5260-5265, 2015.
- [10] T. Ort, L. Paull, and D. Rus, “Autonomous vehicle navigation in rural environments without detailed prior maps,” Int. Conf. on Robotics and Automation, 2018.
- [11] A. Watanabe, S. Bando, and S. Yuta, “Road Following Based Outdoor Navigation by Detecting Orientation and Finding Intersection,” Proc. of the 12th SICE SI Division Annual Conf., pp. 1773-1776, 2011 (in Japanese).
- [12] A. Watanabe, “Research of a High Performance Measurement and Control System for Mobile Robot Based on Offline Calculation Support,” Heisei 26th academic year, Ph.D. Dissertations in Graduate School of Systems and Information Engineering, Department of Computer Science, University of Tsukuba, 2014 (in Japanese).
- [13] Y. Hosoda, R. Sawahashi, N. Machinaka, R. Yamazaki, Y. Sadakuni, K. Onda, R. Kusakari, M. Kimba, T. Oishi, and Y. Kuroda, “Robust Road-Following Navigation System with a Simple Map,” J. Robot. Mechatron., Vol.30, No.4, pp. 552-562, 2018.
- [14] H. Ikeda, Y. Kobayashi, and K. Hirano, “How car navigation systems have been put into practical use,” Synthesiology, Vol.3, No.4, pp. 292-300, 2010 (in Japanese).
- [15] K. Demura and Y. Komoriya, “A Navigation Method using the Mutual Feedback of Way-points and Self-positions,” Advanced Robotics, Vol.26, pp. 1677-1691, 2012.
- [16] G. Grisetti, C. Stachniss, and W. Burgard, “Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters,” IEEE Trans. on Robotics, Vol.23, pp. 34-46, 2007.
- [17] K. M. Wurm, R. Kmmerle, C. Stachniss, and W. Burgard, “Improving Robot Navigation in Structured Outdoor Environments by Identifying Vegetation from Laser Data,” Proc. The 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1217-1222, 2009.
- [18] H. Date, S. Ohkawa, Y. Takita, and J. Kikuchi, “High Precision Localization of Mobile Robot Using LIDAR Intensity of Surface,” Trans. of the Japan Society of Mechanical Engineers, C, Vol.79, No.806, pp. 100-109, 2013 (in Japanese).
- [19] D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,” IEEE Trans. on Robotics and Automation, Vol.4, No.1, pp. 23-33, 1997.
- [20] H. Date and Y. Takita, “Real World Experiments of an Autonomous Mobile Robot in the Pedestrian Environment,” Proc. the 5th Int. Conf. on Automation, Robotics and Applications, pp. 413-418, 2011.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.