Paper:
Estimating Lumbar Load During Motion with an Unknown External Load Based on Back Muscle Activity Measured with a Muscle Stiffness Sensor
Yoshio Tsuchiya*, Yumeko Imamura**, Takayuki Tanaka***, and Takashi Kusaka***
*Department of Engineering for Innovation, National Institute of Technology, Tomakomai College
443 Nishikioka, Tomakomai, Hokkaido 059-1275, Japan
**National Institute of Advanced Industrial Science and Technology
1-1-1 Umezono, Tsukuba, Ibaraki 059-1275, Japan
***Graduate School of Information Science and Technology, Hokkaido University
Kita 14, Nishi 9, Kita-ku, Sapporo, Hokkaido 060-0814, Japan

A forward bending motion is essential in everyday tasks, such as carrying objects, shoveling snow, and performing farm work. However, many people suffer from lumbar pain resulting from forward bending motion, which causes a lumbar disc load owing to the changing of the lumbar shape. We have developed a wearable lumbar load estimation system, which measures the skin shape on the back using a curvature sensor. Because the lumbar load varies with the external load, the lumbar load should be estimated based on the external load. Therefore, we have developed a method for estimating an unknown external force using a muscle stiffness sensor. Muscle strength can be estimated by measuring the muscle hardness from the surface, and the relationship between the external force and the muscle force can be modeled. Using this method, we estimate the dependence of the lumbar load on external forces in real time. In addition, we simplify the calculation by converting the external load into a load resulting from a person’s own weight. We incorporate the proposed method into our wearable sensor system, estimate the lumbar load, and compare this with the results of a musculoskeletal dynamics simulation.
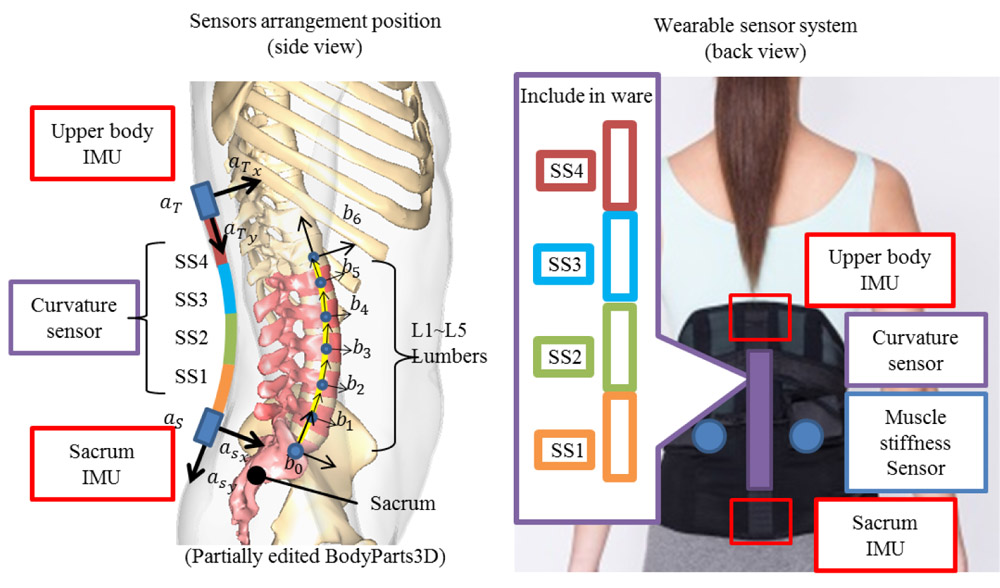
Sensor arrangement of the wearable sensor system
- [1] H. Itoh, K. Fumihiko, and Y. Kazuhito, “Estimates of annual medical costs of work-related low back pain in Japan,” Industrial health, Vol.51, No.5, pp. 524-529, 2013.
- [2] Occupational Safety & Health Administration, “Guidelines for Nursing Homes,” Ergonomics for the Prevention of Musculoskeletal Disorders (ID 3182) U.S.A., 2003.
- [3] M. Van Tulder, A. Becker, T. Bekkering, A. Breen, M. T. del Real, A. Hutchinson, B. Koes, E. Laerum, and A. Malmivaara, “Chapter 3. European guidelines for the management of acute nonspecific low back pain in primary care,” European Spine J., Vol.15, pp. 169-219, 2006.
- [4] J. W. Frymoyer, M. H. Pope, J. H. Clements, D. G. Wilder, B. MacPherson, and T. Ashikaga, “Risk factors in low-back pain. An epidemiological survey,” The J. of Bone and Joint Surgery, Vol.65, No.2, pp. 213-218, 1983.
- [5] W. E. Hoogendoorn, P. M. Bongers, H. C. de Vet, M. Douwes, B. W. Koes, M. C. Miedema, G. A. Ariëns, and L. M. Bouter, “Flexion and rotation of the trunk and lifting at work are risk factors for low back pain: results of a prospective cohort study,” Spine, Vol.25, No.23, pp. 3087-3092, 2000.
- [6] J. L. Kelsey, P. B. Githens, A. A. White, T. R. Holford, S. D. Walter, T. O’Connor, A. M. Ostfeld, U. Weil, and W. O. Southwick, and J. A. Calogero, “An epidemiologic study of lifting and twisting on the job and risk for acute prolapsed lumbar intervertebral disc,” J. of Orthopaedic Research, Vol.2, No.1, pp. 61-66, 1984.
- [7] J. Babic, K. Mombaur, D. Lefeber, J. van Diewn, B. Graimann, M. Russold, N. Sarabon, and H. Houdijk, “SPEXOR: spinal exoskeletal robot for low back pain prevention and vocational reintegration,” Wearable robotics: Challenges and Trends, Springer, pp. 311-315, 2017.
- [8] Y. Naruoka, N. Hiramitsu, and Y. Mitsuya, “A Study of Power-Assist Technology to Reduce Body Burden During Loading and Unloading Operations by Support of Knee Joint Motion,” J. Robot. Mechatron., Vol.28, No.6, pp. 949-957, 2016.
- [9] Y. Imamura, T. Tanaka, Y. Suzuki, K. Takizawa, and M. Yamanaka, “Analysis of trunk stabilization effect by passive power-assist device,” J. Robot. Mechatron., Vol.26, No.6, pp. 791-798, 2014.
- [10] S. Kumagai, H. Tainaka, K. Miyajima, N. Miyano, J. Kosaka, T. Tabuchi, S. Akasaka, H. Kosaka, J. Yoshida, K. Tomioka, and H. Oda, “Load on the Low Back of Care Workers in Nursing Homes for the Elderly,” Sangyo Eiseigaku Zasshi, Vol.47, No.4, pp. 131-138, 2005 (in Japanese).
- [11] T. Ito, “Occupational low back pain in carers with special reference to Roland-Morris Disability Questionnaire,” The J. of Japanese Society of Lumbar Spine Disorders, Vol.15, No.1, pp. 39-44, 2009 (in Japanese).
- [12] E. Sugano, “Consideration about the factor which causes the low back pain in the care worker,” Otsuma Women’s University bulletin of Faculty of Human Relations, Vol.1, pp. 153-157, 2011 (in Japanese).
- [13] K. Sato, K. Shinichi, and Y. Takumi, “In vivo intradiscal pressure measurement in healthy individuals and in patients with ongoing back problems,” Spine, Vol.24, No.23, pp. 2468-2473, 1999.
- [14] T. Yonezawa, Y. Ichimura, T. Onomura, K. Imachi, and A. Kato, “Development and Clinical Application of an Intradiscal Pressure Sensor,” Japanese J. of medical electronics and biological engineering, Vol.35, Vol.3, pp. 18-23, 2006.
- [15] A. Nachemson, “The lumbar spine: an orthopaedic challenge,” Spine, Vol.1, No.1, pp. 59-71, 1976.
- [16] I. Takahashi, S. Kikuchi, K. Sato, and N. Sato, “Mechanical load of the lumbar spine during forward bending motion of the trunk a biomechanical study,” Spine, Vol.31, No.1, pp. 18-23, 2006.
- [17] W. S. Marras, J. Parakkat, A. M. Chany, G. Yang, D. Burr, and S. A. Lavender, “Spine loading as a function of lift frequncy, exposure duration, and work experience,” Clinical Biomechanics, Vol.21, No.4, pp. 345-352, 2006.
- [18] E. Farag and M. Salem, “An evaluation of the NIOSH lifting equation: a psychophysical and biomechanical investigation,” Int. J. of Occupational Safety and Ergonomics, Vol.8, No.2, pp. 243-258, 2002.
- [19] M. Jäger and A. Luttmann, “Critical survey on the biomechanical criterion in the NIOSH method for the design and evaluation of manual lifting tasks,” Int. J. of Industrial Ergonomics, Vol.23, No.4, pp. 331-337, 1999.
- [20] M. Kanayama, S. Tadano, K. Kaneda, T. Ukai, K. Abumi, and M. Ito, “A cineradiographic study on the lumbar disc deformation during flexion and extension of the trunk,” Clinical Biomechanics, Vol.10, No.4, pp. 193-199, 1995.
- [21] C. S. Chen, C. K. Cheng, C. L. Liu, and W. H. Lo, “Stress analysis of the disc adjacent to interbody fusion in lumbar spine,” Medical engineering & physics, Vol.23, No.7, pp. 485-493, 2001.
- [22] T. Zander, A. Rohlmann, J. Calisse, and G. Bergmann, “Estimation of muscle forces in the lumbar spine during upper-body inclination,” Clinical biomechanics, Vol.16, pp. S73-80, 2001.
- [23] F. Alyas, D. Connell, and A. Saifuddin, “Upright positional MRI of the lumbar spine,” Clinical radiology, Vol.63, No.9, pp. 1035-1048, 2008.
- [24] S. Shymon, A. R. Hargens, L. A. Minkoff, and D. G. Chang, “Body posture and backpack loading: an upright magnetic resonance imaging study of the adult lumbar spine,” European Spine J., Vol.23, No.7, pp. 1407-1413, 2014.
- [25] A. K. Aiyangar, L. Zheng, S. Tashman, W. J. Anderst, and X. Zhang, “Capturing three-dimensional in vivo lumbar intervertebral joint kinematics using dynamic stereo-X-ray imaging,” J. of biomechanical engineering, Vol.136, No.1, pp. 011004, 2014.
- [26] Y. Tsuchiya, T. Kusaka, T. Tanaka, Y. Matsuo, M. Oda, T. Sasaki, T. Kamishima, and M. Yamanaka, “A Calibration Method for Interbody Distance in Lumbosacral Alignment Estimation,” Proc., Part II, of the 9th Int. Conf. on Intelligent Robotics and Applications, Vol.9835, pp. 200-210, 2016.
- [27] A. Seo, H. Udo, and F. Yoshinaga, “Electromyogram measuring method for low back load evaluation of handling weight and forward bending posture,” Sangyo Igaku, Vol.35, No.1, pp. 19-24, 1993 (in Japanese).
- [28] M. Fujimura, M. Kawamura, and I. Nara, “The Effect of Changes in Weight on Muscles in Motions of Raising Objects,” Rigakuryoho Kagaku, Vol.17, No.1, pp. 65-70, 2002 (in Japanese).
- [29] J. Furukawa, T. Noda, T. Teramae, and J. Morimoto, “An emg-driven weight support system with pneumatic artificial muscles,” IEEE Systems J., Vol.10, No.3, pp. 1026-1034, 2016.
- [30] W. S. Marras, S. A. Ferguson, D. Burr, K. G. Davis, and P. Gupta, “Spine loading in patients with low back pain during asymmetric lifting exertions,” The Spine J., Vol.4, No.1, pp. 64-75, 2004
- [31] W. S. Marras, J. Parakkat, A. M. Chany, G. Yang, D. Burr, and S. A. Lavender, “Spine loading as a function of lift frequency, exposure duration, and work experience,” Clinical Biomechanics, Vol.21, No.4, pp. 345-352, 2006.
- [32] H. Han and J. Kim, “Active muscle stiffness sensor based on piezoelectric resonance for muscle contraction estimation,” Sensors and Actuators A: Physical, Vol.194, pp. 212-219, 2013.
- [33] M. Ashina, L. Bendtsen, R. Jensen, F. Sakai, and J. Olesen, “Measurement of muscle hardness: a methodological study,” Cephalalgia, Vol.18, No.2, pp. 106-111, 1998.
- [34] S. Moromugi, Y. Koujina, S. Ariki, A. Okamoto, T. Tanaka, M. Q. Feng, and T. Ishimatsu, “Muscle stiffness sensor to control an assistance device for the disabled,” Artificial Life and Robotics, Vol.8, Issue 1, pp. 42-45, 2004.
- [35] Database Center for Life Science, “BodyParts3D©,” licensed under CC display Alike 2.1 Japan, 2013.
- [36] Y. Tsuchiya, T. Kusaka, T. Tanaka, Y. Matsuo, M. Oda, T. Sasaki, T. Kamishima, and M. Yamanaka, “A proposal of lumbosacral load wearable sensor and lumbosacral alignment estimation based on X-ray image,” Trans. of the JSME, Vol.82, No.843, p. 16-00072, 2016 (in Japanese).
- [37] Y. Tsuchiya, T. Kusaka, T. Tanaka, and Y. Matsuo, “Wearable Sensor System for lumbar load Estimation by Considering the Effect of External Load,” Int. Conf. on Applied Human Factors and Ergonomics, pp. 160-168, 2017.
- [38] C. Shi, S. Nishizawa, K. Adachi, and T. Kimura, “Morphological Comparison of the Vertebrae in Humans and Some Other Mammals,” Anthropological Science, Vol.107, No.1, pp. 3-19, 1999 (in Japanese).
- [39] Y. Imamura, K. Ayusawa, and E. Yoshida, “Risk Estimation for Intervertebral Disc Pressure through Musculoskeletal Joint Reaction Force Simulation,” EMBC2017, 2017.
- [40] Y. Nakamura, K. Yamane, Y. Fujita, and I. Suzuki, “Somatosensory Computation for Man-Machine Interface from Motion-Capture Data and Musculoskeletal Human Model,” IEEE Trans. on Robotics, Vol.21, No.1, pp. 58-66, 2005.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.