Paper:
Motion Planning of Mobile Robots for Occluded Obstacles
Satoshi Hoshino and Tomoki Yoshikawa
Department of Mechanical and Intelligent Engineering, Utsunomiya University
7-1-2 Yoto, Utsunomiya, Tochigi 321-8585, Japan

Motion planning of mobile robots for occluded obstacles is a challenge in dynamic environments. The occlusion problem states that if an obstacle suddenly appears from the occluded area, the robot might collide with the obstacle. To overcome this, we propose a novel motion planner, the Velocity Obstacle for occlusion (VOO). The VOO is based on a previous motion planner, the Velocity Obstacle (VO), which is effective for moving obstacles. In the proposed motion planner, information uncertainties about occluded obstacles, such as position, velocity, and moving direction, are quantitatively addressed. Thus, the robot based on the VOO is able to move not only among observed obstacles, but also among the occluded ones. Through simulation experiments, the effectiveness of the VOO for the occlusion problem is demonstrated by comparison with the VO.
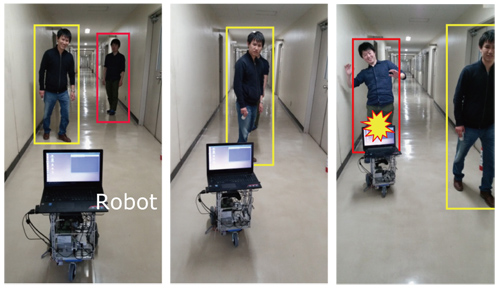
Occlusion problem between robot and humans
- [1] J. C. Latombe, “Robot Motion Planning,” Kluwer Academic, Boston, 1991.
- [2] O. Khatib, “Real-Time Obstacle Avoidance for Manipulators and Mobile Robots,” The Int. J. of Robotics Research, Vol.5, No.1, pp. 90-98, 1986.
- [3] J. Borenstein and Y. Koren, “The Vector Field Histogram-Fast Obstacle Avoidance for Mobile Robots,” IEEE Trans. on Robotics and Automation, Vol.7, No.3, pp. 278-288, 1991.
- [4] D. Fox, W. Burgard, and S. Thrun, “The Dynamic Window Approach to Collision Avoidance,” IEEE Robotics and Automation Magazine, Vol.4, No.1, pp. 23-33, 1997.
- [5] S. Hoshino and K. Maki, “Motion Planning of Multiple Mobile Robots Based on Artificial Potential for Human Behavior and Robot Congestion,” Distributed Autonomous Robotic Systems, pp. 311-324, 2016.
- [6] S. Hoshino and K. Maki, “Safe and Efficient Motion Planning of Multiple Mobile Robots based on Artificial Potential for Human Behavior and Robot Congestion,” Advanced Robotics, Vol.29, No.17, pp. 1095-1109, 2015.
- [7] B. Damas and J. Santos-Victor, “Avoiding Moving Obstacles: the Forbidden Velocity Map,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4393-4398, 2009.
- [8] P. Fiorini and Z. Shiller, “Motion Planning in Dynamic Environments Using Velocity Obstacles,” The Int. J. of Robotics Research, Vol.17, No.7, pp. 760-772, 1998.
- [9] B. Kluge and E. Prassler, “Reflective Navigation: Individual Behaviors and Group Behaviors,” IEEE Int. Conf. on Robotics and Automation, pp. 4172-4177, 2004.
- [10] Y. Kuwata, M. T. Wolf, D. Zarzhitsky, and T. L. Huntsberger, “Safe Maritime Autonomous Navigation with COLREGS, Using Velocity Obstacles,” IEEE J. of Oceanic Engineering, Vol.39, pp. 110-119, 2014.
- [11] C. Fulgenzi, A. Spalanzani, and C. Laugier, “Dynamic Obstacle Avoidance in Uncertain Environment Combining PVOs and Occupancy Grid,” IEEE Int. Conf. on Robotics and Automation, pp. 1610-1616, 2007.
- [12] J. van den Berg, M. Lin, and D. Manocha, “Reciprocal Velocity Obstacles for Real-Time Multi-Agent Navigation,” IEEE Int. Conf. on Robotics and Automation, pp. 1928-1935, 2008.
- [13] J. van den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocal n-body Collision Avoidance,” Robotics Research, pp. 3-19, 2011.
- [14] J. van den Berg, J. Snape, S. J. Guy, and D. Manocha, “Reciprocal Collision Avoidance with Acceleration-Velocity Obstacles,” IEEE Int. Conf. on Robotics and Automation, pp. 3475-3482, 2011.
- [15] J. Miura and Y. Shirai, “Probabilistic Uncertainty Modeling of Obstacle Motion for Robot Motion Planning,” J. Robot. Mechatron., Vol.14, No.4, pp. 349-356, 2002.
- [16] D. Helbing and P. Molnar, “Social force model for pedestrian dynamics,” Physical Review E, Vol.51, No.5, pp. 4282-4286, 1995.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.