Paper:
Autonomous Flight Control of Quadrotor Helicopter by Simple Adaptive Control with Inner Loop PD Controller
Yasuaki Oda* and Makoto Kumon**
*Hirata Corporation
111 Hitotsugi, Ueki, Kita-ku, Kumamoto 861-0198, Japan
**Faculty of Advanced Science and Technology, Kumamoto University
2-39-1 Kurokami, Chuo-ku, Kumamoto 860-8555, Japan

The controller parameters of a quadrotor helicopter have to be properly adjusted for the helicopter to fly stably, while considering the helicopter’s dynamics. Typically, there exists uncertainty in helicopter dynamics such as parametric uncertainty and unmodeled dynamics including external disturbances. To cope with uncertainty in the dynamics, it is effective to update controller parameters according to the performance during the flight. This paper proposes the introduction of a simple adaptive control (SAC), which is an adaptive control technique to augment the conventional attitude controller based on the PD controller to attenuate the effect of uncertainty. The introduction of a constraint to the adaptive gain is also proposed to suppress overshoot in the transient response. In this study, it was demonstrated through numerical simulations and experiments that the proposed controller was effective and that its performance was better in comparison to the original PD controller.
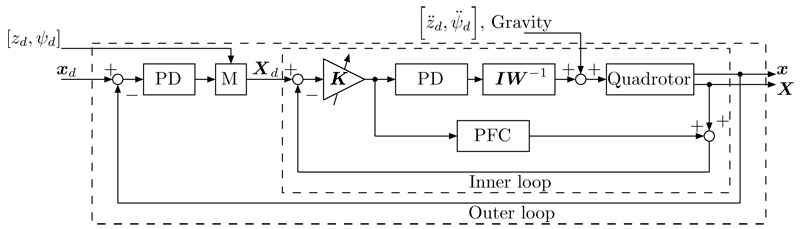
SAC augmented controller for QRH
- [1] S. Binoy and H. Choset, “Survey on urban search and rescue robots,” J. of Robotics Society of Japan, Vol.22, No.5, pp. 582-586, 2004.
- [2] K. Nonami, “Drone technology, cutting-edge drone business, and future prospects,” J. Robot. Mechatron., Vol.28, No.3, pp. 262-272, 2016.
- [3] K. Nonami, F. Kendoul, S. Suzuki, W. Wang, and D. Nakazawa, “Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial Vehicles,” Springer, 1st edition, 2010.
- [4] S. Bouabdallah, A. Noth, and R. Siegwart, “Pid vs lq control techniques applied to an indoor micro quadrotor,” 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Vol.3, pp. 2451-2456, Sept. 2004.
- [5] S. Bouabdallah and R. Siegwart, “Backstepping and sliding-mode techniques applied to an indoor micro quadrotor,” Proc. of the 2005 IEEE Int. Conf. on Robotics and Automation, pp. 2247-2252, April 2005.
- [6] A. Tayebi and S. McGilvray, “Attitude stabilization of a vtol quadrotor aircraft,” IEEE Trans. on Control Systems Technology, Vol.14, No.3, pp. 562-571, May 2006.
- [7] G. V. Raffo, M. G. Ortega, and F. R. Rubio, “An integral predictive/nonlinear h∞ control structure for a quadrotor helicopter,” Automatica, Vol.46, No.1, pp. 29-39, 2010.
- [8] Z. T. Dydek, A. M. Annaswamy, and E. Lavretsky, “Adaptive control of quadrotor uavs: A design trade study with flight evaluations,” IEEE Trans. on Control Systems Technology, Vol.21, No.4, pp. 1400-1406, July 2013.
- [9] C. Coza and C. J. B. Macnab, “A new robust adaptive-fuzzy control method applied to quadrotor helicopter stabilization,” NAFIPS 2006 – 2006 Annual Meeting of the North American Fuzzy Information Processing Society, pp. 454-458, June 2006.
- [10] H. Jafarnejadsani, D. Sun, H. Lee, and N. Hovakimyan, “Optimized l1 adaptive controller for trajectory tracking of an indoor quadrotor,” J. of Guidance, Control, and Dynamics, Vol.40, No.6, pp. 1415-1427, 2017.
- [11] Z. Iwai, I. Mizumoto, and H. Ohtsuka, “Robust and simple adaptive control system design,” Int. J. of Adaptive Control and Signal Processing, Vol.7, No.3, pp. 163-181, 1993.
- [12] Z. Iwai, I. Mizumoto, and M. Deng, “A parallel feedforward compensator virtually realizing almost strictly positive real plant,” Proc. of 1994 33rd IEEE Conf. on Decision and Control, Vol.3, pp. 2827-2832, Dec. 1994.
- [13] M. Kumon, I. Mizumoto, T. Nakamura, and T. Takagi, “Simple adaptive control system design for a quadrotor with an internal pfc,” Proc. of the 10th Int. Conf. on Mathematical Problems in Engineering, Aerospace and Sciences, pp. 673-682, 2014.
- [14] T. Nakamura, I. Mizumoto, and M. Kumon, “Adaptive control system design of a quadrotor by high gain based feedback control via backstepping strategy with an inner-loop pfc,” Proc. of the 12th Int. Conf. on Motion and Vibration Control (MOVIC2014), 2014.
- [15] M. D. Shuster and S. D. Oh, “Three-axis attitude determination from vector observations,” J. of Guidance, Control, and Dynamics, Vol.4, No.1, pp. 70-77, 1981.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.