Paper:
Gait Planning and Simulation Analysis of a New Amphibious Quadruped Robots
Shuo Han, Yuan Chen, Guangying Ma†, Jinshan Zhang, and Runchen Liu
School of Mechanical, Electrical and Information Engineering, Shandong University
180 Wenhua Xilu, Weihai 264209, China
†Corresponding author

In order to allow quadruped robots to adapt to the complex working environment in the field of fisheries and aquaculture, a new type of quadruped robot with linear and rotary driving is proposed, and the kinematic inverse solution of the leg of the quadruped robot is deduced. For achieving quadruped robot smooth walking, the straight gait of the quadruped robot is planned according to the stability margin principle of motion, so that the stability margin of the machine is 20 mm when three legs supporting it. The planning gait is simulated by ADAMS software, the kinematics and dynamics analysis of the four main driving mechanisms of the robot leg were carried out, and the feasibility of using the STEP5 driving function to execute the planning gait in the quadruped robot was verified. The theoretical and simulation curve analysis results show that, the quadruped robot according to the planned gait can complete the cycle and have a stable walking. The results of this study can provide a reference for the practical application of the new amphibious quadruped robot in the fields of complex and uneven ground in the field of fisheries and aquaculture to realize exploration, fishing and transportation.
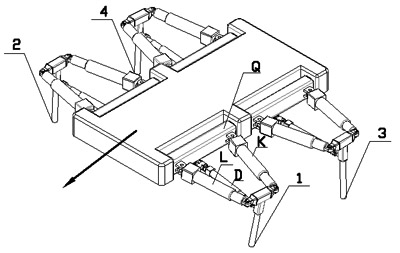
A new amphibious quadruped robots
- [1] G. Y. Ma, Y. Chen, Y. L. Yao, and J. Gao, “Kinematics and Singularity Analysis of a Four-Degree-of-Freedom Serial-Parallel Hybrid Manipulator,” J. of Robotics and Mechatronics, Vol.29, No.3, pp. 520-527, 2017.
- [2] A. S. Boxerbaum, M. A. Klein, J. E. Kline, S. C. Burgess, R. D. Quinn, R. Harkins, and R. Vaidyanathan, “Design, Simulation, Fabrication and Testing of a Bio-Inspired Amphibious Robot with Multiple M-odes of Mobility,” J. of Robotics and Mechatronics, Vol.24, No.4, pp. 279-286, 2012.
- [3] R. Hodoshima, Y. Fukumura, H. Amano, and S. Hirose, “Development of Track-Changeable Quadruped Walking Robot TITAN X-Design of Leg Driving Mechanism and Basic Experiment,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3340-3345, 2010.
- [4] K. Kato and S. Hirose, “Development of the Quadruped Walking Robot TITAN-IX,” Annual Conf. of the IEEE on Industrial Electronics Society, pp. 40-45, 2000.
- [5] S. Hirose, K. Yoneda, and H. Tsukagoshi, “TITAN VII Quadruped Walking and Manipulating Robot on a Steep Slope,” IEEE Int. Conf. on Robotics and Automation, pp. 494-500, 1997.
- [6] M. Raibert, K. Blankespoor, G. Nelson, and R. Playter, “BigDog, the Rough-Terrain Quadruped Robot,” 17th IFAC World Congress (IFAC’08), pp. 10822-10825, 2008.
- [7] D. Wooden, M. Malchano, K. Blankespoor, A. Howard, A. A. Rizzi, and M. Raibert, “Autonomous Navigation for BigDog,” IEEE Int. Conf. on Robotics and Automation, pp. 4736-4741, 2010.
- [8] P. Ruan, Z. W. Yu, and H. Zhang, “Gait Planning and Simulation of Imitation Gecko Robot Based on ADAMS,” Robot, Vol.32, No.4, pp. 499-504, 2010.
- [9] Y. Q. Xu and L. J. Wan, “Quadruped Walking Robot’s Gait Control of the Leg Mechanism and its Stability,” Mechanical Science and Technology, Vol.1, pp. 86-87, 2003.
- [10] B. Zhang, Y. N. Zheng, and W. F. Xu, “Turtle Robot’s Coordinated Gait Planning Based on Stage Performance,” J. of Instrumentation, Vol.38, No.3, pp. 545-551, 2017.
- [11] B. W. Gao, S. K. Wang, and Y. F. Gao, “Single leg Vertical Jump Gait Planning of Hydraulic Quadruped Robot,” J. of Instrumentation, Vol.38, No.5, pp. 1086-1092, 2017.
- [12] L. P. Wand, J. Z. Wang, and S. K. Wang et al., “The gait control strategy of hydraulic quadruped robot based on foot-end trajectory planning algorithm,” J. of Mechanical Engineering, Vol.49, No.1, pp. 39-44, 2013.
- [13] S. L. Tan, “Trajectory of the Rapid Realization of the Robot Design,” Mechanical and Electrical Engineering Technology, Vol.11, No.1, pp. 64-67, 2012.
- [14] X. S. Jiang, “Introduction to Robotics,” Shenyang: Liaoning Science and Technology Press, 1994.
- [15] Z. G. Li, “ADAMS Getting Started Detail and Example. 5th Edition,” Beijing: National Defense Industry Press, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.