Paper:
Development of Upper-Limb Power Assist Machine Using Linkage Mechanism – Drive Mechanism and its Applications –
Hiroyuki Inoue and Toshiro Noritsugu
National Institute of Technology, Tsuyama College
624-1 Numa, Tsuyama-shi, Okayama 708-8509, Japan

This paper proposes an upper-limb power assist machine driven by a single actuator to reduce the weight and cost. This assist machine is used to support the shoulder and elbow movements for viticulture operations, and upper-limb holding for load transport tasks. This assist machine consists of an arm part and a mounting part. The arm part is composed of a parallel link mechanism, which is driven by an actuator and a trapezoidal feed screw. To realize a natural upper-limb motion, the length of the arm part was designed based on the human upper-limb motion. The assist machine is controlled based on the user’s intention by applying bend sensors attached to the input device. By measuring the electromyography signal of five muscles, the effectiveness of the proposed upper-limb power assist machine was verified experimentally.
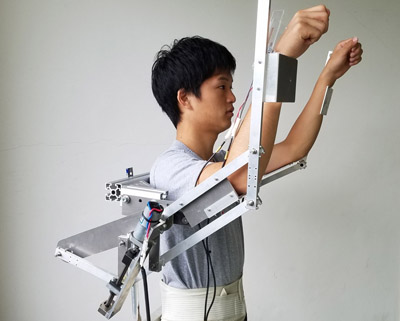
Developed upper-limb power assist machine
- [1] J. Yamashita and K. Sato, “Automated Vehicles for Greenhouse Automation,” J. of Robotics and Mechatronics, Vol.11, No.3, pp. 200-207, 1999.
- [2] Y. Kaizu and J. Choi, “Development of a Tractor Navigation System Using Augmented Reality,” Engineering in Agriculture, Environment and Food, Vol.5, No.3, pp. 96-101, 2012.
- [3] S. Arima and N. Kondo, “Cucumber Harvesting Robot and Plant Training System,” J. of Robotics and Mechatronics, Vol.11, No.3, pp. 208-212, 1999.
- [4] N. Kondo and M. Monta, “Fruit harvesting robotics,” J. of Robotics and Mechatronics, Vol.11, No.4, pp. 321-325, 1999.
- [5] N. Irie, N. Taguchi, T. Horie, and T. Ishimatsu, “Design, Modeling and Performance Testing of End-Effector for Sweet Pepper Harvesting Robot Hand,” J. of Robotics and Mechatronics, Vol.21, No.5, pp. 583-589, 2009.
- [6] S. Bachche and K. Oka, “Design, Modeling and Performance Testing of End-Effector for Sweet Pepper Harvesting Robot Hand,” J. of Robotics and Mechatronics, Vol.25, No.4, pp. 705-717, 2013.
- [7] M. Ishii, K. Yamamoto, and K. Hyodo, “Stand-Alone Wearable Power Assist Suit – Development and Availability –,” J. of Robotics and Mechatronics, Vol.17, No.5, pp. 575-583, 2005.
- [8] H. Kobayashi, T. Aida, and T. Hashimoto, “Muscle Suit Development and Factory Application,” Int. J. of Automation Technology, Vol.3, No.6, pp. 709-715, 2009.
- [9] H. Kobayashi, T. Shiiba, and Y. Ishida, “Realization of All 7 Motions for the Upper Limb by a Muscle Suit,” J. of Robotics and Mechatronics, Vol.16, No.5, pp. 504-512, 2004.
- [10] K. Kiguchi, R. Esaki, and T. Fukuda, “Development of a Wearable Exoskeleton for Daily Forearm Motion Assist,” Advanced Robotics, Vol.19, No.7, pp. 751-771, 2005.
- [11] J. C. Perry and J. Rosen, “Upper-Limb Powered Exoskeleton Design,” IEEE/ASME Trans. on Mechatronics, Vol.12, No.4, pp. 408-417, 2007.
- [12] E. Yagi, D. Harada, and M. Kobayashi, “Development of an Upper Limb Power Assist System using Pneumatic Actuators for Farming Lift-up Motion,” J. of System and Dynamics, Vol.3, No.5, pp. 781-791, 2009.
- [13] E. Yagi, D. Harada, and M. Kobayashi, “Upper-Limb Power-Assist Control for Agriculture Load Lifting,” Int. J. of Automation Technology, Vol.3, No.6, pp. 716-722, 2009.
- [14] K. Miyawaki, “Link Type Arm Support Equipment,” J. of Robotics and Mechatronics, Vol.27, No.1, pp. 110-111, 2015.
- [15] K. Sano, E. Yagi, and M. Sato, “Development of a Assist Suit for Walking and Lifting-Up Motion Using Electric Motors,” J. of Robotics and Mechatronics, Vol.25, No.6, pp. 923-930, 2013.
- [16] K. Nomura, T. Yonezawa, H. Takemura, and H. Mizoguchi, “Development of Six-DOF Human Ankle Motion Control Device Using Stewart Platform Structure for Fall Prevention,” J. of Robotics and Mechatronics, Vol.28, No.5, pp. 654-663, 2016.
- [17] Y. Naruoka, N. Hiramitsu, and Y. Mitsuya, “A Study a Power-Assist Technology to Reduce Body Burden During Loading and Unloading Operations by Support of Knee Joint Motion,” J. of Robotics and Mechatronics, Vol.28, No.6, pp. 949-957, 2016.
- [18] H. Yakushiji, T. Ueno, A. Azuma, and Y. Koshita, “New Labor-Saving Cutting Tool for Grapevine Flower Thinning,” Hort. Res. (Japan), Vol.7, No.1, pp. 81-86, 2008.
- [19] R. A. R. C. Gopura, K. Kiguchi, and E. Horikawa, “A Study on Human Upper-Limb Muscles Activities during Daily Upper-Limb Motions,” Int. J. of Bioelectomagnetism, Vol.12, No.2, pp. 54-61, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.