Development Report:
Development of Robot for 3D Measurement of Forest Environment
Masaru Morita*, Takeshi Nishida*,†, Yuta Arita*, Mirei Shige-eda*, Enrico di Maria**, Roberto Gallone**, and Nicola Ivan Giannoccaro**
*Kyushu Institute of Technology
1-1 Sensui, Tobata, Kitakyushu, Fukuoka 804-8550, Japan
**University of Salento
Via per Monteroni, 73100 Lecce, Italy
†Corresponding author

This paper describes the development of a robot that can move through a forest environment and automatically generates three-dimensional (3D) digital maps. We designed and constructed the robot, equipping it with a rocker-bogie mechanism composed of six drive wheels and four steering motors. This mechanics enables the robot to move damaging a forest as little as possible while negotiating the obstacle in it. This robot is equipped with a 3D light detection and ranging sensor, and it uses the normal distributions transform algorithm to construct 3D digital maps. We tested the generation of a 3D digital map of 50 m2 of a sloped forest environment and verified the generated map by comparing it with a map constructed manually by engineers. The comparison revealed an error of less than 0.15 m.
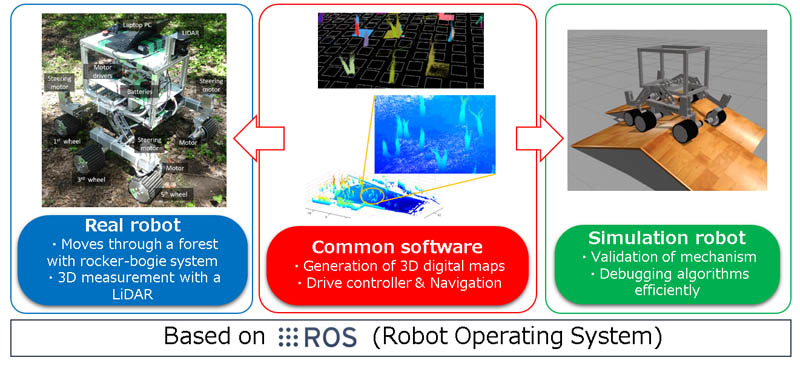
The developed robot that can move through a forest and generate 3D digital maps
- [1] J. Billingsley, A. Visala, and M. Dunn, “Robotics in agriculture and forestry,” Springer handbook of robotics, pp. 1065-1077, Springer, 2008.
- [2] K. Ohno and S. Tadokoro, “Dense 3D map building based on LRF data and color image fusion,” Proc. 2005 IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS 2005), pp. 1774-1779, 2005.
- [3] P. Forsman and A. Halme, “3-D mapping of natural environments with trees by means of mobile perception,” IEEE Trans. on Robotics, Vol.21, No.3, pp. 482-490, 2005.
- [4] K. Olofsson, J. Holmgren, and H. Olsson, “Tree stem and height measurements using terrestrial laser scanning and the RANSAC algorithm,” Remote Sensing, Vol.6, No.5, pp. 4323-4344, 2014.
- [5] J. Tang, Y. Chen, A. Kukko, H. Kaartinen, A. Jaakkola, E. Khoramshahi, T. Hakala, J. Hyyppä, M. Holopainen, and H. Hyyppä, “SLAM-aided stem mapping for forest inventory with small-footprint mobile LiDAR,” Forests, Vol.6, No.12, pp. 4588-4606, 2015.
- [6] M. Miettinen, M. Ohman, A. Visala, and P. Forsman, “Simultaneous localization and mapping for forest harvesters,” Proc. 2007 IEEE Int. Conf. Robotics and Automation, pp. 517-522, 2007.
- [7] R. A. Chisholm, J. Cui, S. K. Lum, and B. M. Chen, “UAV LiDAR for below-canopy forest surveys,” J. of Unmanned Vehicle Systems, Vol.1, No.1, pp. 61-68, 2013.
- [8] J. Q. Cu, S. Lai, X. Dong, and B. M. Chen, “Autonomous navigation of UAV in foliage environment,” J. of Intelligent & Robotic Systems, Vol.84, No.1-4, pp. 259-276, 2016.
- [9] T. Tsubouchi et al., “Forest 3D Mapping and Tree Sizes Measurement for Forest Management Based on Sensing Technology for Mobile Robots,” Field and Service Robotics, pp. 357-368, Springer, 2014.
- [10] H. Kimura, K. Shimuzu, and S. Hirose, “Development of Genbu: active-wheel passive joint snake-like mobile robot,” J. Robot. Mechatron., Vol.16, No.3, pp. 293-303, 2004.
- [11] K. Kamikawa, T. Takubo, Y. Mae, K. Inoue, and T. Arai, “Omni-directional gait of multi-legged robot on rough terrain by following the virtual plane,” J. Robot. Mechatron., Vol.24, No.1, pp. 71-85, 2012.
- [12] R. Shah, S. Ozcelik, and R. Challoo, “Design of a highly maneuverable mobile robot,” Procedia Comput. Sci., Vol.12, pp. 170-175, 2012.
- [13] D. Shrivastava, “Designing of all terrain vehicle,” Int. J. Sci. Res. Publ., Vol.4, No.12, 2014.
- [14] D. Pradham, J. Sen, and N. N. Hui, “Design and development of an automated all-terrain wheeled robot,” Adv. Robot. Res., Vol.1, No.1, pp. 21-39, 2014.
- [15] G. Genta, “Introduction to the Mechanics of Space Robots,” Springer-Verlag, 2012.
- [16] D. Bickler, “PArticulated Suspension Systems,” US Patent No.4,840,394, US Patent Office, 1989.
- [17] D. B. Harrington and C. Voorhees, “The challenges of designing the rocker-bogie suspension for the Mars Exploration Rover,” 37th Aerospace Mechanisms Symposium, 2004.
- [18] P. J. Besl and N. D. McKay, “Method for registration of 3-D shapes,” Proc. SPIE 1611, Sensor Fusion IV: Control Paradigms and Data Structures, pp. 586-606, 1992.
- [19] E. Takeuchi and T. Tsubouchi, “A 3-D scan matching using improved 3-D normal distributions transform for mobile robotic mapping,” 2006 IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 3068-3073, 2006.
- [20] M. Quigley et al., “ROS: an open-source robot operating system,” ICRA Workshop on Open Source Software, 2009.
- [21] N. Koenig and A. Howard, “Design and use paradigms for gazebo, an open-source multi-robot simulator,” Proc. 2004 IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS 2004), Vol.3, pp. 2149-2154, 2004.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.