Paper:
A New IntelliSense Strategy Based on Artificial Immune System for Multi-Robot Cooperation
Tao Xu, Zengyong Shi, and Xiaomin Li
School of Mechanical and Electrical Engineering, Henan Institute of Science and Technology
Eastern HuaLan Avenue, Xinxiang, Henan 453003, China

In this paper, a novel intelliSense strategy based on an artificial immune system for multi-robot cooperation (MRC) is proposed. A laser range finder and camera are mounted on the robot to provide environmental information. Based on the principle of the artificial immune system, environmental information sensed by the robot is considered as an antigen while the robot is regarded as a B-cell and a possible node as an antibody. To improve exploration efficiency, the immune system is utilized in the single robot system (SRS) and multi-robotic system (MRS). Antibody-antigen affinity is calculated to choose optimal number of possible node, ensuring that the exploration path is optimal. Each robot explores independently according to affinity information, and cooperation among robots can be realized by utilizing the interactions among antibodies. In order to make the map merging strategy more persuasive, the Scale-Invariant Feature Transform (SIFT) feature is further used to identify the same region. In a real-context experiment, the proposed algorithm results in more accurate exploration, and it is verified that the proposed intelliSense strategy improves the accuracy and execution efficiency for mobile robots.
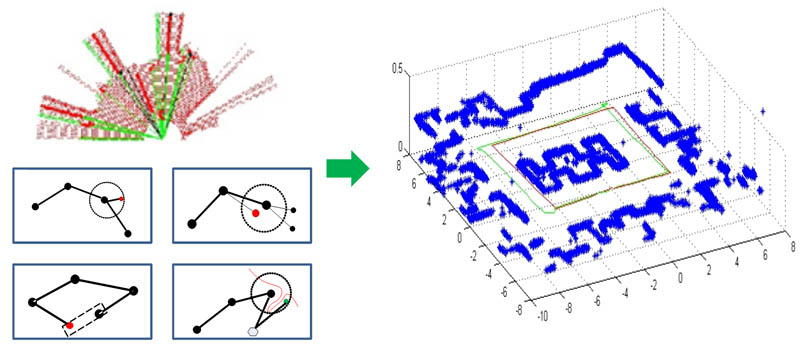
The node decision rule and the final point cloud map results by our method
- [1] Y. Li and S. S. Ge, “Impedance Learning for Robots Interacting with Unknown Environments,” IEEE Trans. Control Syst. Technol, Vol.22, No.4, pp. 1422-1432, 2014.
- [2] A. Sujiwo, T. Ando, E. Takeuchi, Y. Ninomiya, and M. Edahiro, “Monocular Vision-Based Localization Using ORB-SLAM with LIDAR-Aided Mapping in Real-World Robot Challenge,” J. of Robotics and Mechatronics, Vol.28, No.4, pp. 479-490, 2016.
- [3] J. L. Xue, L. Zhang, and T. E. Grift, “Variable Field-of-view Machine Vision Based Row Guidance of An Agricultural Robot,” Computers and Electronics in Agriculture, Vol.84, pp. 85-91, 2012.
- [4] K. Okabe and Y. Aiyama, “Fast Motion of Path Tracking Task with Constant Hand Speed Using Redundant Manipulator,” J. of Robotics and Mechatronics, Vol.27, No.1, pp. 74-82, 2015.
- [5] Y. Zhang, D. W. Gong, and J. H. Zhang, “Robot Path Planning in Uncertain Environment using Multi-objective Particle Swarm Optimization,” Neurocomputing, Vol.103, pp. 172-185, 2013.
- [6] S. M. Jia, X. Zhao, W. B. Qu, and X. Z. Li, “Biological Immune System Applications on Mobile Robot for Disabled People,” J. of Robotics, Vol.2014, pp. 1-6, 2014.
- [7] M. T. Khan, Izhar, F. Nasir, M. Qadir, and J. Iqbal, “Artificial Immune System Based Framework for Multi-Robot Cooperation,” Proc. of the 9th Int. Conf. on Computer Science & Education, pp. 197-201, 2014.
- [8] T. L. Perez and M. A. Wesley, “An Algorithm for Planning Collision-free Paths among Polyhedral Obstacles,” Communications of the ACM, Vol.22, No.10, pp. 560-570, 1979.
- [9] Y. S. Liu, N. Wei, and Y. M. Sun, “Path Planning Algorithm Based on Grid Method for Virtual Human,” Computer Engineering and Design, Vol.29, No.5, pp. 1229-1230, 2008.
- [10] D. B. Gu, H. S. Hu, J. Reynolds, and E. Tsang, “GA-based Learning in Behaviour Based Robotics,” Proc. of the IEEE Int. Symposium on Computational Intelligence in Robotics and Automation, pp. 1521-1526, 2003.
- [11] G. Chen and L. C. Shen, “Genetic Path Planning Algorithm Under Complex Environment,” Robot, Vol.23, No.1, pp. 40-43, 2001.
- [12] J. Yu and V. Kromov, “Fast Algorithm for Path Planning Based on Neural Networks,” Robot, Vol.23, No.3, pp. 201-205, 2001.
- [13] S. S. Ge and Y. J. Cui, “Dynamic Motion Planning for Mobile Robots using Potential Field Method,” Autonomous Robots, Vol.13, No.3, pp. 207-222, 2002.
- [14] J. Liu and D. Y. Yang, “Path Planning Based on Double-layer Genetic Algorithm,” Proc. of the Third Int. Conf. on Natural Computation, pp. 357-361, 2007.
- [15] G. Q. Liu, T. J. Li, and Y. P. Li, “The Ant Algorithm for Solving Robot Path Planning Problem,” Proc. of the Third Int. Conf. on Information Technology and Applications, pp. 25-27, 2005.
- [16] X. Z. Hu, C. X. Xie, and Q. G. Xu, “Robot Path Planning Based on Artificial Immune Network,” Proc. of the IEEE Int. Conf. on Robotics and Biomimetics, pp. 1053-1057, 2007.
- [17] J. D. Farmer, N. H. Packard, and A. S. Perelson, “The Immune System, Adaptation and Machine Learning,” Physica D: Nonlinear Phenomena, Vol.22, No.1, pp. 187-204, 1986.
- [18] A. Ishiguro, Y. Watanabe, and Y. Uchikawa, “An Immunological Approach to Dynamic Behaviour Control for Autonomous Mobile Robots,” Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 495-500, 1995.
- [19] S. A. Wang and J. Zhuang, “An Immunity Algorithm for Path Finding and Optimizing of The Moving Robot,” J. of System Simulation, Vol.14, No.8, pp. 995-997, 2002.
- [20] T. R. Wanasinghe, G. K. L. Mann, and R. G. Gosine, “Relative Localization Approach for Combined Aerial and Ground Robotic System,” J. of Intelligent & Robotic Systems, Vol.77, No.1, pp. 113-133, 2015.
- [21] H. Qu, K. Xing, and T. Alexander, “An Improved Genetic Algorithm with Co-evolutionary Strategy for Global Path Planning of Multiple Mobile Robots,” Neurocomputing, Vol.120, pp. 509-517, 2013.
- [22] T. Kuyucu, I. Tanev, and K. Shimohara, “Superadditive Effect of Multi-robot Coordination in The Exploration of Unknown Environments Via Stigmergy,” Neurocomputing, Vol.148, pp. 83-90, 2015.
- [23] S. S. Gea, Q. Zhang, A. T. Abrahamb, and B. Rebsamen, “Simultaneous Path Planning and Topological Mapping (SP2ATM) for Environment Exploration and Goal Oriented Navigation,” Robotics and Autonomous Systems, Vol.59, No.3-4, pp. 228-242, 2011.
- [24] A. Sedaghat, M. Mokhtarzade, and H. Ebadi, “Uniform Robust Scale-Invariant Feature Matching for Optical Remote Sensing Images,” IEEE Trans. Geosci. Remote Sens, Vol.49, No.11, pp. 4516-4527, 2011.
- [25] S. Gai, E. J. Jung, and B. J. Yi, “Multi-group Localization Problem of Service Robots Based on Hybrid External Localization Algorithm with Application to Shopping Mall Environment,” Intelligent Service Robotics, Vol.9, No.3, pp. 257-275, 2016.
- [26] S. Se, D. G. Lowe, and J. J. Little, “Vision-Based Global Localization and Mapping for Mobile Robots,” IEEE Trans. Robotics, Vol.21, No.3, pp. 364-375, 2005.
- [27] D. G. Lowe, “Distinctive Image Features From Scale-invariant Keypoints,” Int. J. of Computer Vision, Vol.60, No.2, pp. 91-110, 2004.
- [28] J. Li and N. M. Allinson, “A Comprehensive Review of Current Local Features for Computer Vision,” Neurocomputing, Vol.71, pp. 1771-1787, 2008.
- [29] Y. Ishida, “Distributed and Autonomous Sensing Based on The Immune Network,” Artificial Life and Robotics, Vol.2, No.1, pp. 1-7, 1998.
- [30] D. Dasgupta, “Advances in Artificial Immune Systems,” IEEE Computational Intelligence Magazine, Vol.1, No.4, pp. 40-49, 2006.
- [31] O. Richard and M. Andy, “A Hardware Artificial Immune System and Embryonic Array for Fault Tolerant System,” Genetic Programming and Evolvable Machines, Vol.4, No.4, pp. 359-382, 2003.
- [32] D. Dasgupta, “Artificial Neural Networks and Artificial Immune Systems: Similarities and Differences,” Proc. of IEEE Int. Conf. on Systems, Man, and Cybernetics, pp. 873-878, 1997.
- [33] S. J. Sun, D. W. Lee, and K. B. Sim, “Artificial Immune-based Swarm Behaviors of Distributed Autonomous Robotic Systems,” Proc. of IEEE Int. Conf. on Robotics & Automation, pp. 3993-3998, 2001.
- [34] D. G. Lowe, “Object Recognition From Local Scale-invariant Features,” Proc. of IEEE Int. Conf. on Computer vision, pp. 1150-1157, 1999.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.