Paper:
CISTEM Education with Robotic Platform: For Human-Human Synchrony and Human-Machine Synchrony
Kazuki Nakada*, Miwako Tsunematsu**, Takuya Kihara**, Takumu Hattori***, Tatsuji Tokiwa*, and Hiroshi Fukuda*
*Graduate School of Information Sciences, Hiroshima City University
3-4-1 Ozuka-Higashi, Asa-Minami, Hiroshima 731-3194, Japan
**Graduate School of Biomedical and Health Sciences, Hiroshima University
1-2-3 Kasumi, Minami, Hiroshima 734-8553, Japan
***Faculty of Health and Medical Sciences, Hokuriku University
1-1 Taiyogaoka, Kanazawa 920-1154, Japan

In Hiroshima Prefecture, an inter-university collaborative educational project of an interdisciplinary field: Clinical Informatics and Technology (the CIT program) has being implemented. As a part of the CIT program, we have been working on CISTEM (Clinical Information, Science, Technology, Engineering, Mathematics, and Medicine) education to establish a systematic educational curriculum for students (mainly undergraduate students) who will be responsible for medical engineering cooperation/collaboration in the future. In this paper, from the viewpoints of communication and control engineering, we introduce an attempt to enhance students’ problem consciousness and motivation for research and development by facilitating their self-discovery of the design principles commonly required for medical instruments and medical systems through production tasks utilizing robotic platforms. Especially we introduce our case studies focusing on the significance of human-human synchrony and human-machine synchrony towards the realization of symbiosis among humans and machines. We further propose a model case of an CISTEM education customized for undergraduate students who specialize in information, communication and control engineering based on trials conducted in these case studies.
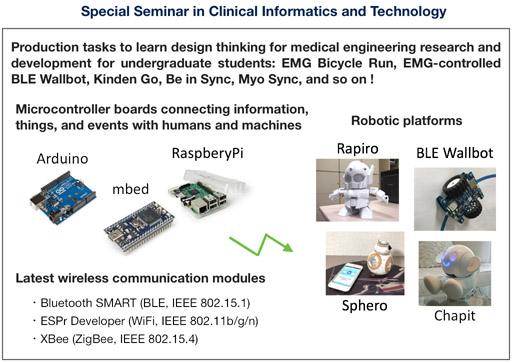
Production tasks of special seminar in Clinical Information and Technology
- [1] M. Ikeuchi, K. Isozaki, K. Kyue, H. Sunabe, N. Shimada, H. Sasago, and K. Ikuta, “Multifunctional optically driven microrobot for realtime 3D bio-manipulation and imaging,” Proc. IEEE Int. Conf. on Micro Electro Mechanical Systems, pp. 29-32, 2011.
- [2] H. Iseki, Y. Muragaki, M. Tamura, T. Suzuki, K. Yoshimitsu, S. Ikuta, J. Okamoto, M. Chernov, and K. Izumi, “SCOT (Smart Cyber Operating Theater) project: advanced medical information analyzer for guidance of the surgical procedures,” Proc. of the Int. Display Workshops, pp. 1880-1883, 2012.
- [3] T. Ubukata, S. Kotosaka, and H. Ohtaki, “Trajectory generation for adaptive motion by phase feedback – synchronization of multicycle human movement –,” J. of Robotics and Mechatronics, Vol.21, No.3, pp. 342-352, 2009.
- [4] S. Schaal, S. Kotosaka, and D. Sternad, “Nonlinear dynamical systems as movement primitives,” Proc. IEEE Int. Conf. on Humanoid Robotics, pp. 1-11, 2000.
- [5] S. Kotosaka and S. Schaal, “Synchronized robot drumming with neural oscillators,” Proc. of Int. Symposium on Adaptive Motion of Animals and Machines, E26, 2000.
- [6] H. Fukuda, Y. Nakano, H. Fujiwara, J. Kohda, and T. Tokiwa, “Student experiments for educating biomedical and information technology engineers in Hiroshima City University,” The Brain & Neural Networks, Vol.23, No.4, pp. 146-152, 2016.
- [7] Y. Nakagawa, M. Kusumi, Y. Maeda, T. Hattori, and K. Nakada, “An interactive music performance system for enhancing rhythmic synchrony in embodied communication,” IPSJ Interaction 2017, 3-406-59, March 2017 (in Japanese).
- [8] Y. Maeda, Y. Nakagawa, M. Kusumi, N. Ito, I. Fujitsuna, T. Hattori, and K. Nakada, “A wearable EMG system for enhancing rhythmic synchrony in embodied communication,” The 11th Annual Meeting of the Japan Association Applied IT Healthcare, PS-10, May 2017 (in Japanese).
- [9] Y. Nakagawa, Y. Maeda, K. Nakada, M. Kusumi, and T. Hattori, “Myo Sync: A wearable EMG system for enhancing rhythmic synchrony in embodied communication,” SISA 2017, RS2-26, Sep. 2017.
- [10] M. Okugawa, “Monodukuri literacy education and control engineering,” J. of the Society of Instrument and Control Engineers, Vol.46, No.9, pp. 697-700, 2007.
- [11] M. Kusumi, Y. Maeda, and T. Hattori, “Development of a Myoelectric potential switch EMG-IR to operate the peripheral devices with an Infrared,” IPSJ Interaction 2016, 162B24, 2016 (in Japanese).
- [12] Y. Fukamachi, M. Kusumi, M. Arita, T. Hattori, and H. Fukuda, “Elite Analyzer: Development of HMD to visualize the degree of heat risk in the event of a disaster,” IPSJ Interaction 2016, pp. 835-836, 2016 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.