Development Report:
Performance Evaluation of Robot Localization Using 2D and 3D Point Clouds
Kiyoaki Takahashi, Takafumi Ono, Tomokazu Takahashi, Masato Suzuki, Yasuhiko Arai, and Seiji Aoyagi
Kansai University
3-3-35 Yamate-cho, Suita, Osaka 564-8680, Japan

Autonomous mobile robots need to acquire surrounding environmental information based on which they perform their self-localizations. Current autonomous mobile robots often use point cloud data acquired by laser range finders (LRFs) instead of image data. In the virtual robot autonomous traveling tests we have conducted in this study, we have evaluated the robot’s self-localization performance on Normal Distributions Transform (NDT) scan matching. This was achieved using 2D and 3D point cloud data to assess whether they perform better self-localizations in case of using 3D or 2D point cloud data.
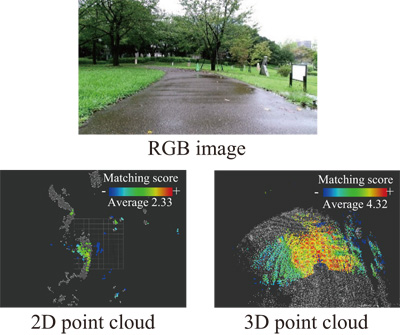
Evaluation of robot localization using point clouds
- [1] T. Shioya, K. Kogure, T. Iwata, and N. Ohta, “Autonomous Mobile Robot Navigation Using Scene Matching with Local Features,” J. of Robotics and Mechatronics, Vol.28, No.6, pp. 887-898, 2016.
- [2] T. Suzuki, M. Kitamura, Y. Amano, and N. Kubo, “Autonomous Navigation of a Mobile Robot Based on GNSS/DR Integration in Outdoor Environments,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 214-224, 2014.
- [3] M. Nomatsu, Y. Suganuma, Y. Yui, and Y. Uchimura, “Development of an Autonomous Mobile Robot with Self-Localization and Searching Target in a Real Environment,” J. of Robotics and Mechatronics, Vol.27, No.4, pp. 356-364, 2015.
- [4] T. Eda, T. Hasegawa, S. Nakamura, and S. Yuta, “Development of Autonomous Mobile Robot “MML-05” Based on i-Cart Mini for Tsukuba Challenge 2015,” J. of Robotics and Mechatronics, Vol.28, No.4, pp. 461-469, 2016.
- [5] A. Sujiwo, T. Ando, E. Takeuchi, Y. Ninomiya, and M. Edahiro, “Monocular Vision-Based Localization Using ORB-SLAM with LIDAR-Aided Mapping in Real-World Robot Challenge,” J. of Robotics and Mechatronics, Vol.28, No.4, pp. 479-490, 2016.
- [6] M. Saito, K. Kiuchi, S. Shimizu, T. Yokota, Y. Fujino, T. Saito, and Y. Kuroda, “Pre-Driving Needless System for Autonomous Mobile Robots Navigation in Real World Robot Challenge 2013,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 185-195, 2014.
- [7] A. Sakai, T. Saitoh, and Y. Kuroda, “Robust Landmark Estimation and Unscented Particle Sampling for SLAM in Dynamic Outdoor Environment,” J. of Robotics and Mechatronics, Vol.22, No.2, pp. 140-149, 2010.
- [8] K. Katsumi et al., “Development of small size 3d lidar,” 2014 IEEE Int. Conf. on Robotics and Automation (ICRA), 2014.
- [9] Q. Morgan et al., “ROS: an open-source Robot Operating System,” ICRA workshop on open source software, Vol.3, No.3.2, 2009.
- [10] G. Giorgio, C. Stachniss, and W. Burgard, “Improved techniques for grid mapping with rao-blackwellized particle filters,” IEEE Trans. on Robotics, Vol.23, No.1, pp. 34-46, 2007.
- [11] G. Giorgio, C. Stachniss, and W. Burgard, “Improving grid-based slam with rao-blackwellized particle filters by adaptive proposals and selective resampling,” Proc. of the 2005 IEEE Int. Conf. on Robotics and Automation (ICRA 2005), 2005.
- [12] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” The MIT Press, 2005.
- [13] B. Peter and W. Straßer, “The normal distributions transform: A new approach to laser scan matching,” Proc. of 2003 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2003), Vol.3, 2003.
- [14] Kalman and R. Emil, “A new approach to linear filtering and prediction problems,” J. of Basic Engineering, Vol.82, No.1, pp. 35-45, 1960.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.