Paper:
Robust Wireless Communication for Small Exploration Rovers Equipped with Multiple Antennas by Estimating Attitudes of Rovers in Several Experimental Environments
Masahiko Mikawa
University of Tsukuba
1-2 Kasuga, Tsukuba, Ibaraki 305-8550, Japan

We are developing a robotic system for an asteroid surface exploration. The system consists of multiple small size rovers, that communicate with each other over a wireless network. Since the rovers configure over a wireless mesh sensor network on an asteroid, it is possible to explore a large area on the asteroid effectively. The rovers will be equipped with a hopping mechanism for transportation, which is suitable for exploration in a micro-gravity environment like a small asteroid’s surface. However, it is difficult to control the rover’s attitude during the landing. Therefore, a cube-shaped rover was designed. As every face has two antennas respectively, the rover has a total of twelve antennas. Furthermore, as the body shape and the antenna arrangements are symmetric, irrespective of the face on top, a reliable communication state among the rovers can be established by selecting the proper antennas on the top face. Therefore, it is important to estimate which face of the rover is on top. This paper presents an attitude estimation method based on the received signal strength indicators (RSSIs) obtained when the twelve antennas communicate among each other. Since the RSSI values change depending on an attitude of the rover and the surrounding environment, a significantly large number of RSSIs were collected as a training data set in different kinds of environments similar to an asteroid; consequently, a classifier for estimating the rover attitude was trained from the data set. A few of the experimental results establish the validity and effectiveness of the proposed exploration system and attitude estimation method.
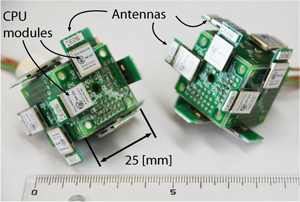
Small rovers equipped with twelve antennas
- [1] D. E. Brownlee, P. Tsou, J. D. Anderson, M. S. Hanner, R. L. Newburn, Z. Sekanina, B. C. Clark, F. Hörz, M. E. Zolensky, J. Kissel, J. A. M. McDonnell, S. A. Sandford, and A. J. Tuzzolino, “Stardust: Comet and interstellar dust sample return mission,” J. of Geophysical Research, Vol.108, No.E10, p. 8111, 2003.
- [2] J. Kawaguchi, A. Fujiwara, and T. Uesugi, “Hayabusa: Its technology and science accomplishment summary and Hayabusa-2,” Acta Astronautica, Vol.62, No.10-11, pp. 639-647, 2008.
- [3] T. Kubota and T. Yoshimitsu, “Intelligent rover with hopping mechanism for asteroid exploration,” 6th Int. Conf. on Recent Advances in Space Technologies (RAST2013), pp. 979-984, 2013.
- [4] T. Kubota and T. Yoshimitu, “Intelligent micro probe robot for small body exploration,” IEEE/ASME Int. Conf. on Advanced Intelligent Mechatoronics, 2008, pp. 1131-1136, 2008.
- [5] T. Yoshimitsu, T. Kubota, A. Tomiki, and Y. Kuroda, “Development of hopping rovers for a new challenging asteroid,” 12th Int. Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS 2014), 2014.
- [6] M. Chacin, A. Mora, and K. Yoshida, “Motion control of multi-limbed robots for asteroid exploration missions,” IEEE Int. Conf. on Robotics and Automation (ICRA ’09), pp. 3037-3042, 2009.
- [7] M. Kurisu, “Novel hopping mechanism using permanent magnets for tiny asteroid exploration rover,” Int. Symposium on Artificial Intelligence, Robotics and Automation in Space, 2012.
- [8] K. Nagaoka, R. Takano, T. Izumo, and K. Yoshida, “Ciliary micro-hopping locomotion of an asteroid exploration robot,” Int. Symposium on Artificial Intelligence, Robotics and Automation in Space, 2012.
- [9] S. E. W. Yan, T. Yoshimitsu, and T. Kubota, “Visual odometry for a hopping rover on an asteroid surface using multiple monocular cameras,” Advanced robotics: the Int. J. of The Robotics Society of Japan, Vol.25, No.6, pp. 893-921, 2011.
- [10] S. Kanata, H. Nakanishi, T. Sawaragi, T. Yoshimitsu, and I. Nakatani, “Radio wave based localization of a rover for a small planetary body,” The 27th IASTED Int. Conf. on Modeling, Identification and Control, 2008.
- [11] M. Mikawa, “Self-localization using plural small rovers for asteroid wide-area exploration,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS2013), pp. 769-774, 2013.
- [12] M. Mikawa, “Asteroid exploration using plural small rovers and relative distance estimation on undulating terrain,” 12th Int. Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS 2014), 2014.
- [13] T. Yoshimitu, T. Kubota, and I. Nakatani, “Minerva rover which became a small artificial solar satellite,” The 20th Annual AIAA/USU Conf. on Small Satellites, SSC06-IV-4, 2006.
- [14] M. Kurisu, “Design of a hopping mechanism using permanent magnets for small-scale exploration rovers,” 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2014), pp. 2355-2360, 2014.
- [15] M. Mikawa, “Asteroid wide-area exploration system using plural small rovers and relative distance estimation,” 6th Int. Conf. on Recent Advances in Space Technologies (RAST2013), pp. 949-954, 2013.
- [16] E. Frank, M. A. Hall, and I. H. Witten, “The WEKA Workbench,” Online Appendix for “Data Mining: Practical Machine Learning Tools and Techniques (Fourth Edition),” Morgan Kaufmann, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.