Paper:
Traversability-Based RRT* for Planetary Rover Path Planning in Rough Terrain with LIDAR Point Cloud Data
Reiya Takemura and Genya Ishigami
School of Integrated Design Engineering, Keio University
3-14-1 Hiyoshi, Kohoku-ku, Yokohama, Kanagawa 223-8522, Japan

Sampling-based search algorithms such as Rapidly-Exploring Random Trees (RRT) have been utilized for mobile robot path planning and motion planning in high dimensional continuous spaces. This paper presents a path planning method for a planetary exploration rover in rough terrain. The proposed method exploits the framework of a sampling-based search, the optimal RRT (RRT*) algorithm. The terrain geometry used for planning is composed of point cloud data close to continuous space captured by a light detection and ranging (LIDAR) sensor. During the path planning phase, the proposed RRT* algorithm directly samples a point (node) from the LIDAR point cloud data. The path planner then considers the rough terrain traversability of the rover during the tree expansion process of RRT*. This process improves conventional RRT* in that the generated path is safe and feasible for the rover in rough terrain. In this paper, simulation study on the proposed path planning algorithm in various real terrain data confirms its usefulness.
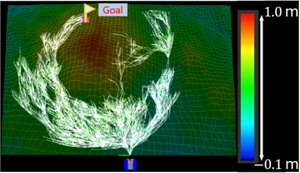
Tree generated by the proposed planning method
- [1] J. Leonard, J. How, S. Teller, M. Berger, S. Campbell, G. Fiore, L. Fletcher, E. Frazzoli, A. Huang, S. Karaman, O. Koch, Y. Kuwata, D. Moore, E. Olson, S. Peters, J. Teo, R. Truax, M. Walter, D. Barrett, A. Epstein, K. Maheloni, K. Moyer, T. Jones, R. Buckley, M. Antone, R. Galejs, S. Krishnamurthy, and J. Williams, “A Perception-driven Autonomous Urban Vehicle,” J. of Field Robotics, Vol.25, 2008.
- [2] D. Dolgov, S. Thrun, M. Montemerlo, and J. Diebel, “Practical search techniques in path planning for autonomous driving,” Proc. of the First Int. Symposium on Search Techniques in Artificial Intelligence and Robotics, Vol.1001, p. 48105, 2008.
- [3] J. Carsten, A. Rankin, D. Ferguson, and A. Stentz, “Global planning on the Mars Exploration Rovers: Software integration and surface testing,” J. of Field Robotics, Special Issue on Space Robotics, Part II archive, Vol.26, Issue 4, pp. 337-357, 2009.
- [4] M. Sutoh, M. Otsuki, S. Wakabayashi, and T. Hoshino, “The Right Path: Comprehensive Path Planning for Lunar Exploration Rovers,” IEEE Robotics & Automation Magazine, Vol.22, Issue 1, pp. 22-33, 2015.
- [5] G. Ishigami, M. Otsuki, and T. Kubota, “Range-dependent Terrain Mapping and Multipath Planning using Cylindrical Coordinates for a Planetary Exploration Rover,” J. of Field Robotics, Vol.30, No.4, pp. 536-551, 2013.
- [6] C. Ye and J. Borenstein, “A method for mobile robot navigation on rough terrain,” Proc. IEEE Int. Conf. on Robotics and Automation (ICRA ’04), Vol.4, pp. 3863-3869, 2004.
- [7] I. Rekleitis, J. Bedwani, S. Gemme, T. Lamarche, and E. Dupuis, “Terrain modelling for planetary exploration,” Proc. of the 4th Canadian Conf. on Computer and Robot Vision, pp. 243-249, 2007.
- [8] I. Rekleitis, J. Bedwani, E. Dupuis, and P. Allard, “Path Planning for Planetary Exploration,” Canadian Conf. on Computer and Robot Vision 2008 (CRV ’08), pp. 61-68, 2008.
- [9] S. M. LaValle, “Rapidly-Exploring Random Trees: A New Tool for Path Planning,” Computer Science Dept., Iowa State University, Technical Report TR 98-11, 1998.
- [10] S. Karaman and E. Frazzoli, “Sampling-based Algorithms for Optimal Motion Planning,” Int. J. of Robotics Research, Vol.30, No.7, pp. 846-894, 2011.
- [11] J. D. Gammell, S. S. Srinivasa, and T. D. Bafoot, “Informed RRT*: Optimal Sampling-based Path Planning Focused via Direct Sampling of an Admissible Ellipsoidal Heuristic,” IROS 2014, pp. 2997-3004, 2014.
- [12] S. Choudhury, J. D. Gammell, T. D. Bafoot, S. S. Srinivasa, and S. Scherer, “Regionally Accelerated Batch Informed Trees (RABIT*): A Framework to Integrate Local Information into Optimal Path Planning,” ICRA 2016, pp. 4207-4214, 2016.
- [13] Y. Kuwata, J. Teo, G. Fiore, S. Karaman, E, Frazzoli, and J. P. How, “Real-Time Motion Planning With Applications to Autonomous Urban Driving,” IEEE Trans. on Control Systems Technology, Vol.17, No.5, pp. 1105-1118, 2009.
- [14] D. Belter, P. Labecki, and P. Skrzypczyński, “An Exploration-based Approach to Terrain Traversability Assessment for a Walking Robot,” SSRR, pp. 1-6, 2013.
- [15] A. Ettlin and H. Bleuler, “Rough-Terrain Robot Motion Planning based on Obstacleness,” 2006 9th Int. Conf. on Control, Automation, Robotics and Vision, pp. 1-6, 2006.
- [16] J. Lee, C. Pippin, and T. Balch, “Cost Based Planning with RRT in Outdoor Environments,” 2008 IEEE/RSJ Int. Conf. on Intell. Robots and Systems, pp. 22-26, 2008.
- [17] J. Suh and S. Oh, “A cost-aware path planning algorithm for mobile robots,” 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4724-4729, 2012.
- [18] L. Jaillet, J. Cortés, and T. Siméon, “Sampling-based path planning on configuration-space costmaps,” IEEE Trans. on Robotics, Vol.26, No.4, pp. 635-646, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.