Development Report:
On-Orbit Demonstration of Tether-Based Robot Locomotion in REX-J Mission
Hiroki Nakanishi*1, Mitsuhiro Yamazumi*1, Sotaro Karakama*1, Mitsushige Oda*1, Shin-ichiro Nishida*2, Hiroki Kato*3, Keisuke Watanabe*3, Atsushi Ueta*3, Masahiro Yoshii*4, and Satoshi Suzuki*4
*1Tokyo Institute of Technology
2-12-1 Oookayama, Meguro, Tokyo 152-8550, Japan
*2Tottori University
4-101 Koyamacho-Minami, Tottori, Tottori 680-8552, Japan
*3Japan Aerospace Exploration Agency
2-1-1 Sengen, Tsukuba, Ibaraki 305-8505, Japan
*4Advanced Engineering Service Co., Ltd.
1-6-1 Takezono, Tsukuba-shi, Ibaraki 305-0032, Japan

Locomotion is an important factor affecting astronaut support robots that are used in construction, repair, and inspection. Its requirements include long reach, compactness, and light weight. Tether is a good candidate because it allows for a long reach but is very light. It is also compact when wound up. The authors have previously proposed a reconfigurable tether-based locomotion method. In the concept, the robot attaches/detaches its tethers to/from handrails on the spacecraft and moves by controlling the length and tension of the tethers. From August 2012 to May 2013, JAXA conducted the Robot Experiment on JEM (REX-J) mission, experimentally demonstrating the proposed method on the International Space Station. During the experiment, all the locomotion tasks were successfully completed. This paper describes the results of these locomotion experiments.
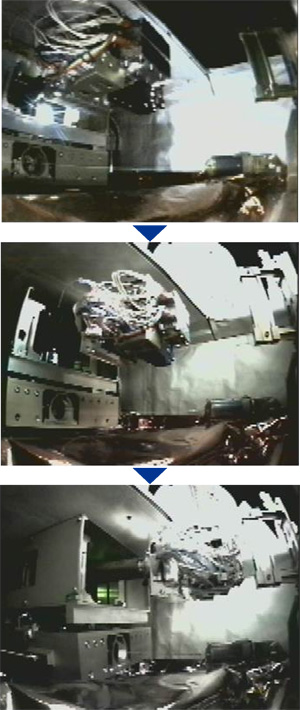
Tether-based locomotion of REX-J
- [1] P. K. Nguyen and P. C. Hughes, “Teleoperation: From the Space Shuttle to the Space Station,” AIAA Progress in Aeronautics & Astronautics Vol.161, pp. 353-410, 1994.
- [2] E. Coleshill et al., “Dextre: Improving maintenance operations on the International Space Station,” Acta Astronautica, Vol.64, Issues 9-10, pp. 869-874, 2008.
- [3] N. Sato and Y. Wakabayashi, “JEMRMS Design Features and Topics from Testing,” Proc. of 6th i-SAIRAS, pp. 1-7, 2001.
- [4] G. V. Tzvetkova, “Robonaut 2: Mission, Technologies, Perspectives,” J. of Theoretical and Applied Mechanics, Vol.44, Issue 1, pp. 97-102, 2014.
- [5] S. E. Fredrickson et al., “On-orbit engineering tests of the aercam sprint robotic camera vehicle,” Adv. Astronaut. Sci., Vol.99, Issue Pt.2, pp. 1001-1020, 1998.
- [6] A. Saenz-Otero and D. Miller, “The SPHERES ISS laboratory for rendezvous and formation flight,” European Space Agency-Publications-ESA SP 516, pp. 217-224, 2003.
- [7] M. Oda, “Tethered robot which moves along a large space structure,” Proc. of the Space Science and Technology Symposium, 1D03, 2007.
- [8] J. S. Albus et al., “The NIST ROBOCRANE,” J. of Research of the National Institute of Standards and Technology, Vol.97, No.3, pp. 373-385, 1992.
- [9] S. Kawamura, W. Choe, S. Tanaka, and S. R. Pandian, “Development of an ultrahigh speed robot FALCON using wire drive system,” Robotics and Automation, Vol.1, pp. 215-220, 1995.
- [10] P. L. Swaim, C. J. Thompson, and P. D. Campbell, “The Charlotte intra-vehicular robot,” Technical Report N95-23703, NASA, pp. 157-162, 1994.
- [11] P. E. Glaser, “Power from the Sun: Its Future,” Science, Vol.162, pp. 867-886, 1968.
- [12] S. Sasaki et al., “Conceptual Study of SSPS Demonstration Experiment,” The Radio Science Bulletin, No.310, pp. 9-14, 2004.
- [13] M. Oda et al., “Proposal of a Tethered Space Walking Robot – REX-J: Robot Experiment on JEM –,” Trans. of the Japan Society for Aeronautical and Space Sciences, Space Technology Japan, Vol.7, No.ists26, pp. Td7-Td12, 2009.
- [14] H. Nakanishi et al., “Vibration Analysis for the Extendable Robot Arm of REX-J,” Trans. of the Japan Society for Aeronautical and Space Science, Space Technology Japan, Vol.12, No.ists29, pp. Tk57-Tk62, 2015.
- [15] J. D. MacNaughton, H. N. Weyman, and E. Groskopfs, “The BI-STEM – A New Technique in Unfurlable Structures,” Technical Memorandum, Jet Propulsion Laboratory, Vol.33, No.355, pp. 139-145, 1967.
- [16] T. Ueno and M. Oda, “Development of an Index Finger for the Dexterous Hand for Space,” Trans. of th Japan Society of Mechanical Engineers, Vol.28, pp. 349-359, 2010.
- [17] M. Yamazumi and M. Oda, “Tether Based Locomotion for Astronaut Support Robot Introduction of Robot Experiment on JEM,” J. Robot. Mechatron., Vol.25 No.2, pp. 306-315, 2013.
- [18] S. Suzuki et al., “Evaluation of the tether based locomotion using image processing in the REX-J mission,” Trans. of the JSME, Vol.81, No.824, 2015 (in Japanese).
- [19] R. G. Roberts, T. Graham, and J. M. Trumpower, “On the inverse kinematics, statics, and fault tolerance of cable – suspended robots,” J. of Robotic Systems, Vol.15, Issue 10, pp. 581-597, 1998.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.