Paper:
Maneuvering Support System for an Amphibian Vehicle – Warning Display to Prevent Rough Maneuvers –
Ryota Hayashi*1, Genki Matsuyama*2, Hisanori Amano*3, Hitomu Saiki*3, Tetsuya Kinugasa*1, Koji Yoshida*1, Masatsugu Iribe*4, and Kenichi Tokuda*5
*1Department of Mechanical Systems Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan
*2Ichihara Works, Mitsui Chemicals, Inc.
3 Chigusa-kaigan, Ichihara, Chiba 299-0108, Japan
*3National Research Institute of Fire and Disaster
4-35-3 Jindaiji-Higashi-Machi, Chofu, Tokyo 182-0012, Japan
*4Department of Electro-Mechanical Engineering, Osaka Electro-Communication University
18-8 Hatsu-cho, Neyagawa, Osaka 572-8530, Japan
*5Faculty of Systems Engineering, Wakayama University
930 Sakaedani, Wakayama 640-8510, Japan

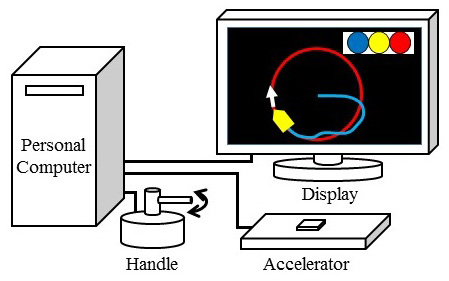
Amphibian vehicle maneuvering simulator
- [1] K. Kubota, “Development of fire fighting vehicles for tsunami disaster sites,” Japan Fire Equipment Inspection Institute – Kentei-Kyokai-Dayori, No.397, pp. 14-19, 2014 (in Japanese).
- [2] R. Hayashi, G. Matsuyama, H. Amano, H. Saiki, T. Kinugasa, Y. Yong, M. Iribe, and K. Tokuda, “Study on maneuvering support system for an amphibian rescue vehicle on the surface of water,” Trans. of the Japan Society of Mechanical Engineers, Vol.81, No.823, 2015 (in Japanese).
- [3] M. Onosato, “Development challenges of robot systems for mitigation of tsunami disaster,” Proc. of the 2012 JSME Conf. on Robotics and Mechatronics, 2A2-N09, 2012 (in Japanese).
- [4] R. Hayashi, “Desired Robot Technology in Consideration of the Records on Natural Disasters in Kyushu Region,” J. of Robotics and Mechatronics, Vol.26, No.4, pp. 442-448, 2014.
- [5] J. R. Amyot (Ed.), “Hovercraft technology, economics and applications,” Studies in Mechanical Engineering, Vol.11, Elsevier Science Publishing Company, pp. 121-131, 1989.
- [6] T. Mita, “Introduction to nonlinear control theory – skill control of underactuated robots –,” Shokodo, pp. 95-137, 2000 (in Japanese).
- [7] H. Khennouf and C. C. de Wit, “On the construction of stabilizing discontinuous controllers for nonholonomic systems,” Proc. of IFAC Nonlinear Control Systems Design, pp. 667-672, 1995.
- [8] K. Motonaka, T. Goto, K. Watanabe, and S. Maeyama, “Stabilization control to an arbitrary equilibrium point for a mobile robot with two independent driving wheels,” Proc. of the 2014 JSME Conf. on Robotics and Mechatronics, 2A2-E05, 2014 (in Japanese).
- [9] A. Morinaga, M. Svinin, and M. Yamamoto, “Modeling of tire friction force for drifting control,” Proc. of the 2014 JSME Conf. of Robotics and Mechatronics, 2A2-C05, 2014 (in Japanese).
- [10] R. Hayashi, K. Osuka, and T. Ono, “Trajectory control experiment of an air cushion vehicle,” J. of the Japan Society for Aeronautical and Space Sciences, Vol.44, No.514, pp. 629-636, 1996 (in Japanese).
- [11] R. Hayashi, K. Osuka, and T. Ono, “Trajectory control of an air cushion vehicle,” Proc. of the 1994 IEEE/RSJ/SICE Int. Conf. on Intelligent Robots and Systems, pp. 1906-1913. 1994.
- [12] J.-J. Slotine and W. Li, “Applied nonlinear control,” pp. 100-156, Prentice-Hall, 1991.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.