Paper:
Time-Scale Control Approaches to Collisionless Walking of an Underactuated Rimless Wheel
Fumihiko Asano*, Yanqiu Zheng*, and Xuan Xiao**
*School of Information Science, Japan Advanced Institute of Science and Technology
1-1 Asahidai, Nomi, Ishikawa 923-1292, Japan
**School of Aerospace Engineering, Tsinghua University
1 Tsinghua Yuan, Haidian District, Beijing 100084, China

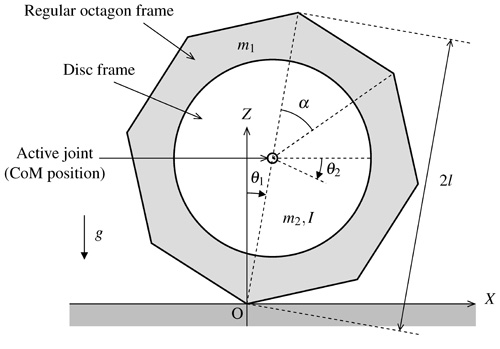
Underactuated rimless wheel model for collisionless walking
- [1] E. R. Dunn and R. D. Howe, “Towards smooth bipedal walking,” Proc. of the IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 2489-2494, 1994.
- [2] M. Rostami and G. Bessonnet, “Impactless sagittal gait of a biped robot during the single support phase,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1385-1391, 1998.
- [3] M. Hutter, C. D. Remy, M. A. Hoepflinger, and R. Siegwart, “Efficient and versatile locomotion with highly compliant legs,” IEEE/ASME Trans. on Mechatronics, Vol.18, No.2, pp. 449-458, 2013.
- [4] M. W. Gomes and K. Ahlin, “Quiet (nearly collisionless) robotic walking,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 5761-5766, 2015.
- [5] E. R. Westervelt, J. W. Grizzle, C. Chevallereau, J. H. Choi, and B. Morris, “Feedback Control of Dynamic Bipedal Robot Locomotion,” CRC Press, 2007.
- [6] F. Asano, “Fully analytical solution to discrete behavior of hybrid zero dynamics in limit cycle walking with constraint on impact posture,” Multibody System Dynamics, Vol.35, Issue 2, pp. 191-213, 2015.
- [7] F. Asano and X. Xiao, “Output deadbeat control approaches to fast convergent gait generation of underactuated spoked walker,” Proc. of the IEEE/SICE Int. Symp. on System Integration, pp. 265-270, 2012.
- [8] T. McGeer, “Passive dynamic walking,” Int. J. of Robotics Research, Vol.9, No.2, pp. 62-82, 1990.
- [9] M. J. Coleman, A. Chatterjee, and A. Ruina, “Motions of a rimless spoked wheel: a simple three-dimensional system with impacts,” Dynamics and Stability of Systems, Vol.12, Issue 3, pp. 139-159, 1997.
- [10] A. Goswami, “Postural stability of biped robots and the foot rotation indicator (FRI) point,” Int. J. of Robotics Research, Vol.18, No.6, pp. 523-533, 1999.
- [11] M. Vukobratović and J. Stepanenko, “On the stability of anthropomorphic systems,” Mathematical Biosciences, Vol.15, Issue 1-2, pp. 1-37, 1972.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.