Paper:
Servoing Performance Enhancement via a Respiratory Organ Motion Prediction Model for a Non-Invasive Ultrasound Theragnostic System
Tatsuya Fujii*1, Norihiro Koizumi*2, Atsushi Kayasuga*1, Dongjun Lee*1, Hiroyuki Tsukihara*1, Hiroyuki Fukuda*3, Kiyoshi Yoshinaka*4, Takashi Azuma*1, Hideyo Miyazaki*1, Naohiko Sugita*1, Kazushi Numata*3, Yukio Homma*1, Yoichiro Matsumoto*1, and Mamoru Mitsuishi*1
*1The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
*2The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan
*3Yokohama City University
4-57 Urafune-cho, Minami-ku, Yokohama, Kanagawa 232-0024, Japan
*4National Institute of Advanced Industrial Science and Technology
1-2-1 Namiki, Tsukuba, Ibaraki 305-8564, Japan

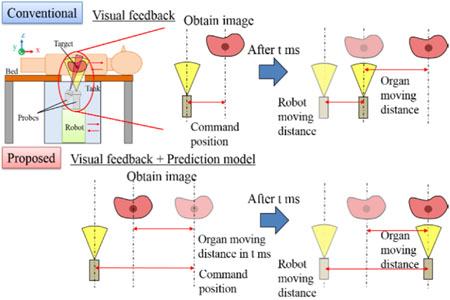
Proposed method for tracking and following respiratory organ motion
- [1] T. Ikeda, S. Yoshizawa, N. Koizumi, M. Mitsuishi, and Y. Matsumoto, “Focused ultrasound and Lithotripsy,” Therapeutic Ultrasound, Advances in Experimental Medicine and Biology (ADV EXP MED BIOL), J.-M. Escoffre and A. Bouakaz (Eds.), Vol.880, Springer-Verlag, pp. 113-129, 2016.
- [2] K. Numata, H. Fukuda, M. Ohto, R. Itou, A. Nozaki, M. Kondou, M. Morimoto, E. Karasawa, and K. Tanaka, “Evaluation of the therapeutic efficacy of high-intensity focused ultrasound ablation of hepatocellular carcinoma by three-dimensional sonography with a perflubutane-based contrast agent,” European J. of Radiology, Vol.75, pp. e67-e75, 2010.
- [3] S. Shoji, V. Mouraviev, and S. Scionti, “High intensity focused ultrasound (HIFU) treatment of prostate cancer,” Handbook of Focal Therapy for Prostate and Renal Cancer Truls, E Bjerklund Johansen, Damien Greene, David J Breen, Vladimir Mouraviev, JP Medical Ltd, London, 2016.
- [4] H. Shirato, S. Shimizu, K. Kitamura, and R. Onimaru, “Organ motion in image-guided radiotherapy: lessons from real-time tumor-tracking radiotherapy,” The Japan Society of Clinical Oncology, Vol.12, pp. 8-16, 2007.
- [5] A. Richter, J. Wilbert, and K. Baier, “Feasibility Study for Markerless Tracking of Lung Tumors in Stereotactic Body Radiotherapy,” Int. J. Radiation Oncology Biol. Phys., Vol.78, pp. 618-627, 2010.
- [6] Y. Yang, Z. Zhong, X. Guo, and J. Wang, “A Novel Markerless Technique to Evaluate Daily Lung Tumor Motion Based on Conventional Cone-Beam CT Projection Data,” Int. J. Radiation Oncology Biol. Phys., Vol.82, pp. 749-756, 2011.
- [7] L. Brix, S. Ringgaard, T. S. Sørensen, and P. R. Poulsen, “Three-dimensional liver motion tracking using real-time two-dimensional MRI,” Medical Physics, Vol.41, 2014.
- [8] J. Fehrenbach, M. Masmoudi, and D. Melodelima, “Low dimensional optimization for in vivo real-time porcine liver motion estimation using ultrasound imaging,” Ultrasonics, Vol.50, pp. 44-51,2010.
- [9] R. H. Abhilash, S. Chauhan, and M. V. Che, “Quantitative Study on the Effect of Abnormalities on Respiration-Induced Kidney Movement,” Ultrasound in Med. & Biol., Vol.42, pp. 1681-1688, 2016.
- [10] J. Seo, N. Koizumi, M. Mitsuishi, and N. Sugita, “Ultrasound image based visual servoing for moving target ablation by high intensity focused ultrasound,” Int. J. of Medical Robotics and Computer Assisted Surgery (IJMRCAS), e1793, DOI: 10.1002/rcs.1793, 2016.
- [11] P. Arnold et al., “3D Organ Motion Prediction for MR-Guided High Intensity Focused Ultrasound,” MICCAI 2011 Lecture Notes in Computer Science, Vol.6892, pp. 623-630, 2011.
- [12] F. Marquet et al., “Optimal transcostal high-intensity focused ultrasound with combined real-time 3D movement tracking and correction,” Phys. Med. Biol., Vol.56, pp. 7061-7080, 2011.
- [13] B. Bussels et al., “Respiration-induced movement of the upper abdominal organs: a pitfall for the three-dimensional conformal radiation treatment of pancreatic cancer,” Radiotherapy and Oncology, Vol.68, pp. 69-74, 2003.
- [14] N. Koizumi et al., “A novel redundant motion control mechanism in accordance with medical diagnostic and therapeutic task functions for a NIUTS,” Proc. of 2014 IEEE/RSJ Int. Conf. Intelligent Robotics and Systems (IROS 2014), pp. 2009-2016, 2014.
- [15] N. Koizumi, T. Funamoto, and J. Seo et al., “A novel robust template matching method to track and follow body targets for NIUTS,” Proc. of 2014 IEEE Int. Conf. Robotics and Automation (ICRA 2014), pp. 1929-1936, 2014.
- [16] N. Koizumi, K. Ota, D. Lee et al., “Feed-Forward Controller for the Integrated Non-Invasive Ultrasound Diagnosis and Treatment,” J. of Robotics and Mechatronics, Vol.20, pp. 1-9, 2008.
- [17] R. Ginhoux, J. Gangloff, and M. Mathelin, “Active Filtering of Physiological Motion in Robotized Surgery Using Predictive Control,” IEEE Trans. on Robotics, Vol.21, pp. 67-79, 2005.
- [18] O. Bebek and M. C.Cavusoglu, “Predictive Control Algorithms Using Biological Signals for Active Relative Motion Canceling in Robotic Assisted Heart Surgery,” Proc. of 2006 IEEE Int. Conf. Robotics and Automation (ICRA 2006), pp. 237-244, 2006.
- [19] N. Koizumi et al., “A control framework for the non-invasive ultrasound theragnostic system,” Proc. of 2009 IEEE/RSJ Int. Conf. Intelligent Robotics and Systems (IROS 2009), pp. 4511-4566, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.