Paper:
Outdoor Sound Source Detection Using a Quadcopter with Microphone Array
Takuma Ohata*, Keisuke Nakamura**, Akihide Nagamine*, Takeshi Mizumoto**, Takayuki Ishizaki*, Ryosuke Kojima*, Osamu Sugiyama*, and Kazuhiro Nakadai*,**
*Graduate School of Information Science and Engineering, Tokyo Institute of Technology
2-12-1 Ookayama, Meguro-ku, Tokyo 152-8552, Japan
**Honda Research Institute Japan Co., Ltd.
8-1 Honcho, Wako-shi, Saitama 351-0114, Japan

* This work is an extension of our publication “Takuma Ohata et al.: Improvement in outdoor sound source detection using a quadrotor-embedded microphone array, IROS 2014, pp.1902-1907, 2014.”
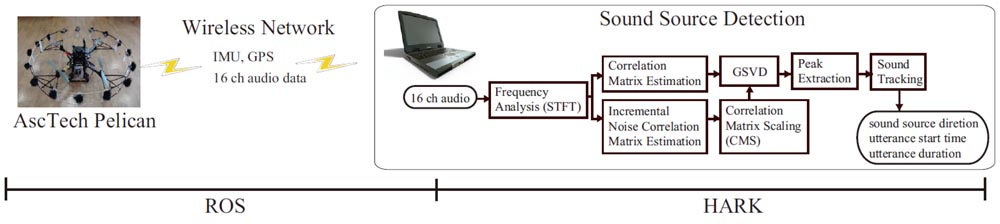
System architecture for sound source detection using a quadcopter with a microphone array
- [1] K. Nakadai, H. G. Okuno, H. Nakajima, Y. Hasegawa, and H. Tsujino, “Design and implementation of robot audition system HARK,” Advanced Robotics, Vol.24, No.9, pp. 739-761, 2009.
- [2] Y. Sasaki, N. Hatao, K. Yoshii, and S. Kagami, “Nested iGMM recognition and multiple hypothesis tracking of moving sound sources for mobile robot audition,” Proc. of the IEEE/RSJ Int. Conf. on Robots and Intelligent Systems (IROS), pp. 3930-3936, 2013.
- [3] Y. Bando, T. Mizumoto, K. Itoyama, K. Nakadai, and H. G. Okuno, “Posture estimation of hose-shaped robot using microphone array localization,” Proc. of the IEEE/RSJ Int. Conf. on Robots and Intelligent Systems (IROS), pp. 3446-3451, 2013.
- [4] B. Kaushik, D. Nance, and K. K. Ahuj, “A review of the role of acoustic sensors in the modern battlefield,” Proc. of 11th AIAA/CEAS Aeroacoustics Conf. (26th AIAA Aeroacoustics Conf.), pp. 1-13, 2005.
- [5] H.-E. de Bree, “Acoustic vector sensors increasing UAV’s situational awareness,” SAE Technical Paper, p. 3249, 2009.
- [6] K. Okutani, T. Yoshida, K. Nakamura, and K. Nakadai, “Outdoor auditory scene analysis using a moving microphone array embedded in a quadrocopter,” Proc. of the IEEE/RSJ Int. Conf. on Robots and Intelligent Systems (IROS), pp. 3288-3293, 2012.
- [7] K. Nakamura, K. Nakadai, F. Asano, Y. Hasegawa, and H. Tsujino, “Intelligent sound source localization for dynamic environments,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 664-669, 2009.
- [8] R. Schmidt, “Multiple emitter location and signal parameter estimation,” IEEE Trans. on Antennas and Propagation, Vol.34, No.3, pp. 276-280, 1986.
- [9] K. Furukawa, K. Okutani, K. Nagira, T. Otsuka, K. Itoyama, K. Nakadai, and H. G. Okuno, “Noise correlation matrix estimation for improving sound source localization by multirotor UAV,” Proc. of the IEEE/RSJ Int. Conf. on Robots and Intelligent Systems (IROS), pp. 3943-3948, 2013.
- [10] K. Nakamura, K. Nakadai, and G. Ince, “Real-time super-resolution sound source localization for robots,” Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 694-699, 2012.
- [11] T. Ohata, K. Nakamura, T. Mizumoto, T. Tezuka, and K. Nakadai, “Improvement in outdoor sound source detection using a quadrotor-embedded microphone array,” Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1902-1907, 2014.
- [12] K. Okutani, T. Yoshida, K. Nakamura, and K. Nakadai, “Incremental noise estimation in outdoor auditory scene analysis using a quadrocopter with a microphone array,” J. of Robotics Society of Japan, Vol.31, No.7, pp. 676-683, 2013 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.