Paper:
Evaluation of Microphone Array for Multirotor Helicopters
Takahiro Ishiki, Kai Washizaki, and Makoto Kumon
Kumamoto University
2-39-1 Kurokami, Chuo-ku, Kumamoto 860-8555, Japan

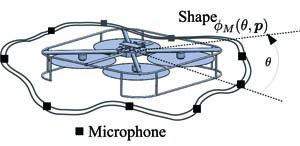
UAV with a microphone array whose performance is evaluated
- [1] Y. Sasaki, S. Kagami, and H. Mizoguchi, “Multiple sound source mapping for a mobile robot by self-motion triangulation,” Proc. of 2006 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 380-385, 2006.
- [2] Y. Sasaki, M. Kaneyoshi, S. Kagami, H. Mizoguchi, and T. Enomoto, “Pitch-cluster-map based daily sound recognition for mobile robot audition,” J. of Robotics and Mechatronics, Vol.22, No.3, pp. 402-410, 2010.
- [3] J. Even, N. Kallakuri, L. Y. Morales, C. Ishi, and N. Hagita, “Creation of radiated sound intensity maps using multi-modal measurements onboard an autonomous mobile platform,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3433-3438, 2013.
- [4] M. Kumon and S. Uozumi, “Binaural localization for a mobile sound source,” J. of Biomechanical Science and Engineering, Vol.6, No.1, pp. 26-39, 2011.
- [5] R. O. Schmidt, “Multiple emitter location and signal parameter estimation,” IEEE Trans. on Antennas and Propagation, Vol.34, No.3, pp. 276-280, 1986.
- [6] K. Nakamura, K. Nakadai, F. Asano, Y. Hasegawa, and H. Tsujino, “Intelligent sound source localization for dynamic environments,” 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, October 11-15, 2009, St. Louis, MO, USA, pp. 664-669, 2009.
- [7] K. Okutani, T. Yoshida, K. Nakamura, and K. Nakadai, “Outdoor auditory scene analysis using a moving microphone array embedded in a quadrocopter,” Proc. of 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3288-3293, 2012.
- [8] T. Ohata, K. Nakamura, T. Mizumoto, T. Tezuka, and K. Nakadai, “Improvement in outdoor sound source detection using a quadrotor-embedded microphone array,” Proc. of 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1902-1907, 2014.
- [9] K. Furukawa, K. Okutani, K. Nagira, T. Otsuka, K. Itoyama, K. Nakadai, and H. G. Okuno, “Noise correlation matrix estimation for improving sound source localization by multirotor UAV,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3943-3948, 2013.
- [10] M. Basiri, F. S. Schill, P. U. Lima, and D. Floreano, “Robust acoustic source localization of emergency signals from micro air vehicles,” Proc. of 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4737-4742, 2012.
- [11] M. Basiri, F. Schill, D. Floreano, and P. Lima, “Audio-based relative positioning system for multiple micro air vehicle systems,” Proc. of Robotics: Science and Systems 2013 (RSS2013), 2013.
- [12] M. Kumon and T. Ishiki, “A microphone array configuration for an auditory quadrotor helicopter system,” Proc. of the 12 th IEEE Int. Symposium on Safety, Security and Rescue Robotics, p. 34, 2014.
- [13] T. Ishiki and M. Kumon, “Design model of microphone arrays for multirotor helicopters,” 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2015), Hamburg, Germany, Sep. 28 to Oct. 2, 2015, pp. 6143-6148, 2015.
- [14] M. Munekata, Y. Chono, Y. Yokoyama, D. Tsuji, and H. Yoshikawa, “Characteristics of flow field around quad-rotor in hovering,” Proc. of The 5th Asian Joint Workshop on Thermophysics and Fluid Science 2014, 2014.
- [15] A. Tayebi and S. McGilvray, “Attitude stabilization of a VTOL quadrotor aircraft,” IEEE Trans. Contr. Sys. Techn., Vol.14, No.3, pp. 562-571, 2006.
- [16] M. J. Lighthill, “On sound generated aerodynamically. I. General theory,” Proc. of the Royal Society A, Vol.211, No.1107, pp. 564-587, 1952.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.