Paper:
Realization of Prefilter for Virtual Reference Feedback Tuning Using Closed-Loop Step Response Data
Yoshihiro Matsui*, Hideki Ayano*, Shiro Masuda**, and Kazushi Nakano***
*Department of Electrical Engineering, National Institute of Technology, Tokyo College
1220-2 Kunugida-machi, Hachioji, Tokyo 193-0997, Japan
**Graduate School of System Design, Tokyo Metropolitan University
6-6 Asahi-ga-oka, Hino, Tokyo 191-0065, Japan
***Graduate School of Informatics and Engineering, The University of Electro-Communications
1-5-1 Chofu-ga-oka, Chofu, Tokyo 182-8585, Japan

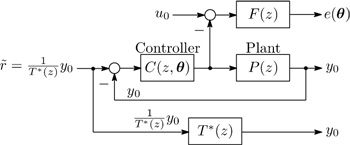
VRFT model matching problem with prefilter F(z)
- [1] M. C. Campi, A. Lecchini, and S. M. Savaresi, “Virtual reference feedback tuning: a direct method for the design of feedback controllers,” Automatica, Vol.38, Issue 8, pp. 1337-1346, 2002.
- [2] O. Kaneko, Y. K. Beak, and T. Ohtsuka, “Closed Loop Identification Based on the Virtual Reference Feedback Tuning Applied to a Virtual Two-Degree-of-Freedom Control System,” SICE J. of Control, Measurement, and System Integration, Vol.2, No.3 pp. 168-176, 2009.
- [3] L. Campestrini, D. Eckhard, M. Gevers, and A. S. Bazanella, “Virtual Reference Feedback Tuning for non-minimum phase plants,” Automatica, Vol.47, Issue 8, pp. 1778-1784, 2011.
- [4] Y. Wakasa, K. Tanaka, and S. Nakashima, “Modified Virtual Reference Feedback Tuning and Its Application to Ultrasonic Motors,” Int. J. of Innovative Computing, Information and Control, Vol.9, No.11, pp. 4321-4329, 2013.
- [5] S. Formentin, M. C. Campi, and S. M. Savaresi, “Virtual Reference Feedback Tuning for industrial PID controllers,” IFAC World Congress, pp. 11275-11280, 2014.
- [6] S. Soma, O. Kaneko, and T. Fujii, “A New Approach to Parameter Tuning of Controllers by Using One-Shot Experimental Data – A Proposal of Fictitious Reference Iterative Tuning,” Trans. of Institute of Systems, Control, and Information Engineering, Vol.17, No.12, pp. 528-536, 2004 (in Japanese).
- [7] O. Kaneko, K. Yoshida, K. Matsumoto, and T. Fujii, “A New Parameter Tuning for Controllers Based on Least-Squares Method by Using One-Shot Closed Loop Experimental Data-An Extension of Fictitious Reference Iterative Tuning,” Trans. of Institute of Systems, Control, and Information Engineering, Vol.18, No.11, pp. 404-409, 2005 (in Japanese).
- [8] K. Tasaka, M. Kano, M. Ogawa, S. Masuda, and T. Yamamoto, “Direct PID Tuning from Closed-Loop Data and Its Application to Unstable Processes,” Trans. of Institute of Systems, Control, and Information Engineering, Vol.22, No.4, pp. 137-144, 2009 (in Japanese).
- [9] O. Kaneko, Y. Yamashina, and S. Yamamoto, “Fictitious Reference Tuning of the Feed-Forward Controller in a Two-Degree-of-Freedom Control System,” SICE J. of Control, Measurement, and System Integration, Vol.4, Issue 1, pp. 55-62, 2011.
- [10] A. Karimi, K. V. Heusden, and D. Bonvin, “Noniterative Data-driven Controller Tuning Using the Correlation Approach,” Proc. of European Control Conf. 2007, pp. 5189-5195, 2007.
- [11] M. Saeki, O. Hamada, and N. Wada, “PID Gain Tuning Based on Falsification Using Bandpass Filters,” Trans. of Institute of Systems, Control, and Information Engineering, Vol.20, No.8, pp. 347-354, 2007 (in Japanese).
- [12] Y. Goda, S. Masuda, and Y. Matsui, “Design of FRIT Method Using Optimal Prefilter Based on Frequency Domain and its Application to the PID Gains Tuning,” IEEJ Trans. EIS, Vol.134, No.9, pp. 1247-1254, 2014 (in Japanese).
- [13] S. Masuda, X. Kong, K. Udagawa, and Y. Matsui, “Virtual Feedback Reference Tuning Using Closed-loop Step Response Data in Frequency Domain,” IEEJ Trans. EIS, Vol.136, No.5, pp. 715-721, 2016 (in Japanese).
- [14] O. Kaneko, M. Miyachi, and T. Fujii, “Notes on the Optimality of the Fictitious Reference Iterative Tuning,” Trans. of Society of Instrument and Control Engineers, Vol.44, No.6, pp. 541-543, 2008 (in Japanese).
- [15] O. Kaneko, “Data-Driven Controller Tuning FRIT approach,” Proc. of IFAC Workshop on Adaptation and Learning of Control and Signal Processing, pp. 326-336, 2013.
- [16] H. Hjalmarsson, S. Gunnarson, and M. Gevers, “Model-free tuning of a robust regulator for a flexible transmission system,” European J. of Control, Vol.1, No.2, pp. 148-156, 1995.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.